# runtime.map 🗺️
# 1. 基本用法
# 1.1 概述
非线程安全的 ⚠️
# 不能作为 map 类型的 key ❌
- slice(可将其序列化为字符串,做为 key)
- map (可将其序列化为字符串,作为 key)
- func
# 可以作为 map 类型的 key ✅
- 基本类型:int,float64,string,bool 等
- 指针类型:*int,*string 等
- 结构体:但结构体的所有字段必须可以比较
- 接口类型:当接口的底层动态类型和动态值都支持比较时,可以作为键。
# nil map 和 空 map 的区别 🔍
- nil map:未初始化的 map,不能进行写操作,会 panic;可以进行读取操作,但始终返回零值。
- 空 map:已初始化的 map,可以进行写操作,但不会分配内存
# 1.2 初始化 🚀
# 1.2.1 几种初始化方法
-
通过 make 关键字初始化,同时指定 map 预分配容量
myMap := make(map[int]int,2)
-
通过 make 关键字初始化,不显示声明容量,因此默认容量为 0
myMap := make(map[int]int)
-
初始化操作连带赋值
myMap := map[int]int {
1:2,
3:4
}
# 1.2.2 key 的类型要求
map 中,key 的数据类型必须为可比较的类型,map、func 不可比较
# 1.3 读 📖
-
直接读
v := myMap[10]
-
读的同时添加一个 bool 类型的 flag 标识是否读取成功。倘若 ok == false,说明读取失败,key 不存在,或者 map 未初始化
v,ok := myMap[10]
# 1.4 写 ✍️
# 1.5 删 🗑️
# 1.6 遍历 🔄
# 1.7 并发冲突 ⚡
map 不是并发安全的数据结构,倘若存在并发读写行为,会抛出 fatal error
具体规则:
- 并发读没有问题
- 并发读写中的 “写” 是广义上的,包含写入、更新、删除等操作
- 读的时候发现其他 goroutine 在并发写,抛出 fatal error
- 写的时候发现其他 goroutine 在并发写,抛出 fatal error
# 2. 核心原理 🔧
# 2.1 hash 🔐
将任意长度的输入压缩到某一固定长度的输出摘要的过程,属于压缩映射,输入空间远大于输出空间,因此不同输入可能会映射成相同的输出结果
- 可重入性:相同的 key,必然产生相同的 hash 值
- 离散性:只要两个 key 不同,无论其相似度的高低,产生的 hash 值会在整个输出域内均匀的离散化
- 单向性:无法通过 hash 值反向映射回 key
- hash 冲突:由于输入域(key)无穷大,输出域(hash 值)有限,因此必然存在不同 key 映射到相同 hash 值的情况
# 2.2 桶数组 🪣
map 中,会通过长度为 2 的整数次幂的桶数组进行 key-value 对的存储
- 每个桶固定可以存放 8 个 key-value 对
- 倘若超过 8 个 key-value 对打到数组的同一个索引当中,此时会通过创建桶链表的方式来化解这一问题
# 2.3 拉链法解决 hash 冲突 ⛓️
-
拉链法
将命中同一个桶的元素通过链表的形式进行链接,因此很方便动态扩展
-
开放定址法
在插入新条目时,会基于一定的探测策略持续寻找,直到找到一个可用于存放数据的空位为止
# 2.4 扩容优化性能 📈
倘若 map 的桶数组长度固定不变,那么随着 key-value 对数量的增长,当下一个桶下挂在的 key-value 达到一定的量级,此时操作的时间复杂度趋于线性,无法满足要求。
因此在实现上,map 桶数组的长度会随着 key-value 对数量的变化而实时调整,以保证每个桶内的 key-value 对数量始终控制在常量级别,满足各项操作位 O (1) 时间复杂度的要求。
map 扩容机制的核心点包括:
- 扩容分为增量扩容和等量扩容
- 当桶内 key-value 总数 / 桶数组长度 > 6.5 时发生增量扩容,桶数组长度增长为原值的两倍
- 当桶内溢出桶数量大于等于 2^B 时(B 为桶数组长度的指数,B 最大取 15),发生等量扩容,桶的长度保持为原值
- 采用渐进式扩容,当桶被实际操作到时,由使用者负责完成数据迁移,避免因为一次性的全量数据迁移引发性能抖动
# map 的扩容(growing)🔄
# 为什么扩容 🤔
扩容是 go 中 map 维护性能和效率的重要机制,其核心目的是 避免哈希冲突过多导致查找、插入效率下降。
-
控制负载因子
- 负载因子 = 元素总数 / 桶(bucket)数量
- go 的 map 默认最大负载因子为 6.5
- 当超过这个值时,说明每个 bucket 平均存储了超过 6.5 个键值对,哈希冲突严重,会影响性能
- 扩容可以降低负载因子,提高查找 / 插入效率
-
减少哈希碰撞
-
每个 bucket 只能存 8 个键值对(bucketCnt=8)
-
如果某个 bucket 已满,会使用溢出桶(overflow bucket)
-
溢出桶越多,查找链就越长,性能越差
-
扩容增加 bucket 数量,减少冲突链长度
-
-
维持 O (1) 时间复杂度
-
理性情况下,map 的插入和查找操作应该接近常数时间复杂度 O (1)
-
随着数据增长,不扩容 hi 导致操作卑微 O (n),由其是在大量冲突的情况下
-
扩容保证 map 操作保持高效,维持阶级恩 O (1) 的性能。
-
-
渐进式迁移
-
Go 的扩容不是一次性完成的
-
使用增量迁移,每次操作之前已一部分 bucket
-
避免一次性迁移所有数据带来的性能抖动
-
# 触发扩容条件 ⚡
mapassign 函数中,触发 map 扩容的条件主要包括以下两种情况:
-
超过负载因子阈值
-
当前 map 中的元素数量(包含所有 bucket 中的有效键值对)超过了 bucketCount * loadFactor / 100,其中 loadFactor 是负载因子(默认为 6.5)
-
这个阈值确保了 map 的查找效率不会因为过渡填充而下降
-
func overLoadFactor(count int, B uint8) bool {
return count > abi.MapBucketCount && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
}
-
-
溢出桶过多
- 即使元素总数未达到负载因子上限,但如果出现了太多溢出桶(overflow buckets),也会触发扩容。这是因为某些 bucket 已满的情况下,新元素只能插入到溢出桶中,形成链表结构,随着链表增长,查找效率下降。
- Go 在运行时会检查溢出桶的数量,并在必要时扩容。
# 扩容策略 🎯
-
扩容方式
扩容为原来的 2 倍(即 bucket 数量翻倍)
-
增量迁移
扩容后并不会立即迁移所有数据,而是通过后续的每次操作(如插入、删除、遍历)逐步迁移数据,以减少
一次性性能开销。
# 3. 数据结构 🏗️
# 3.1 hmap
Map 的底层在 runtime/map.go
hmap 结构体
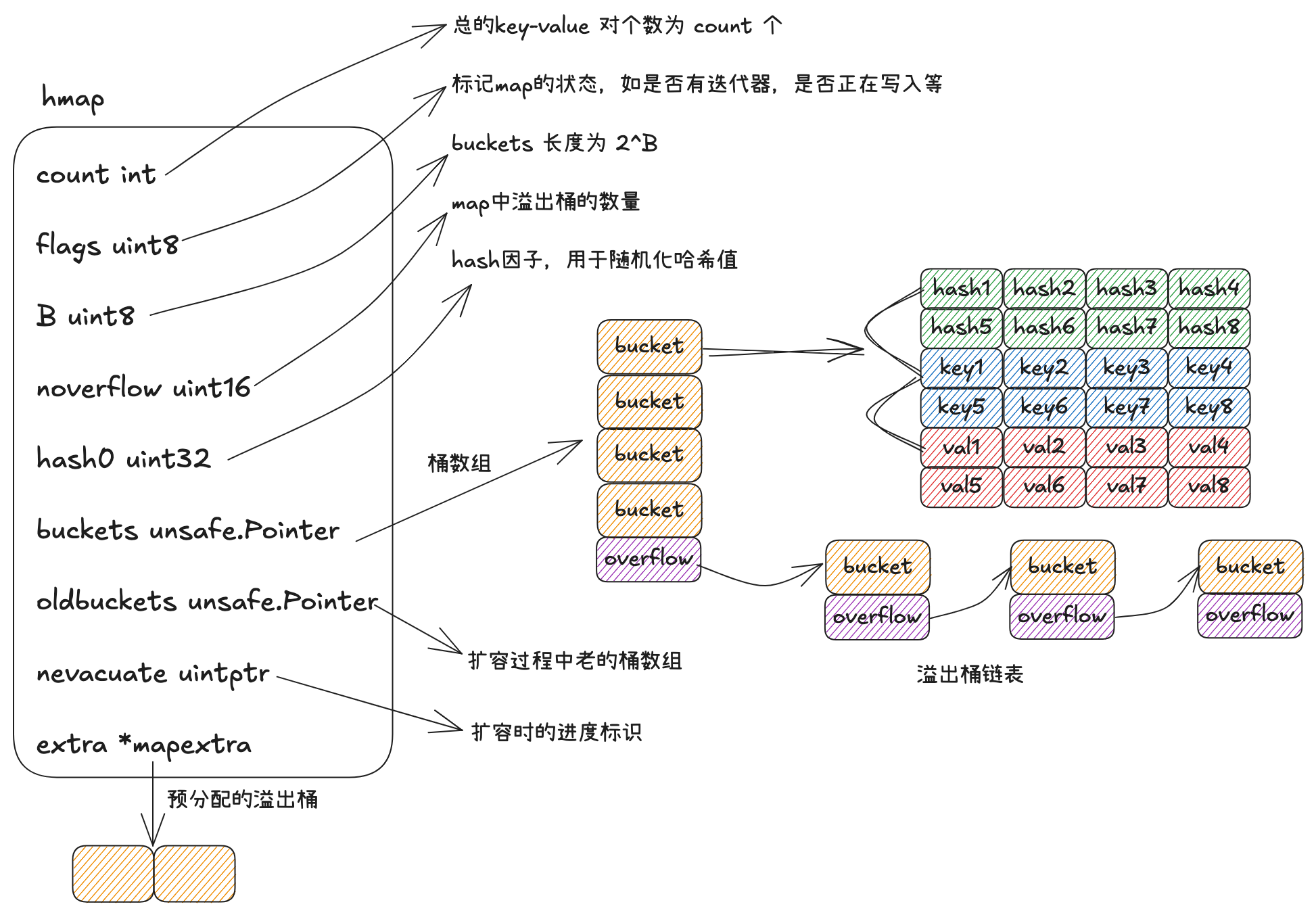
type hmap struct { | |
count int // 当前 map 中的元素个数 | |
flags uint8 // 标记 map 的状态,如是否有迭代器、是否正在写入等(使用位标志) | |
B uint8 // 当前 bucket 数量对数(即 buckets 的数量是 1<<B ) | |
noverflow uint16 // 近似记录溢出 bucket 的数量,用于触发相同大小的扩容 | |
hash0 uint32 //hash 种子,用于随机化哈希值,防止碰撞攻击 | |
buckets unsafe.Pointer // array of 2^B Buckets. may be nil if count==0. | |
oldbuckets unsafe.Pointer // previous bucket array of half the size, non-nil only when growing | |
nevacuate uintptr // progress counter for evacuation (buckets less than this have been evacuated) | |
extra *mapextra // 可选字段,包含溢出 bucket 的引用和下一块可用的溢出 bucket 指针 | |
} |
# 3.2 mapextra 结构体 🔧
type mapextra struct { | |
//overflow 和 oldoverflow 用于保存溢出桶的指针。 | |
// 如果 key 和 elem 不包含指针,则标记 bucket 类型为不包含指针。 | |
// 这避免了扫描此类 maps。 | |
overflow *[]*bmap // 指向当前桶溢出的 bucket 列表 | |
oldoverflow *[]*bmap // 指出旧桶溢出的 bucket 列表 | |
// nextOverflow holds a pointer to a free overflow bucket. | |
nextOverflow *bmap // 下一个可用的溢出 bucket | |
} |
-
overflow
作用:存储指向所有当前主桶溢出的 bucket 的指针列表。当竹筒装不下新键值对时,会分配新的 bucket 并通过 overflow 维护这些溢出 bucket
使用场景:当插入的键值对数量超过当前桶容量时,运行时会动态分配新的 bucket,并将其添加到 overflow 中
-
oldoverflow
作用:存储指向所有旧桶(hmap.oldbuckets)溢出的 bucket 的指针列表。在扩容过程中,旧桶的数据会被逐步迁移到新桶中,此字段用于保留旧桶的溢出链。
使用场景:在 map 扩容期间,为了确保迭代器能正确访问旧桶及其溢出 bucket,需要维护 oldoverflow。
-
nextOverflow
作用:指向下一个可以使用的溢出 bucket。用于快速分配新的溢出 bucket。
使用场景:插入操作导致当前 bucket 已满时,从 nextOverflow 取出下一个空闲溢出 bucket 使用;若无则新建。
总结:
- overflow 和 oldoverflow 主要用于 GC 跟踪和迭代器支持,在 map 缩小或扩容时保留溢出 bucket。
- nextOverflow 提高溢出 bucket 分配效率,减少频分内存分配开销。
# 3.3 bmap 结构体 🪣
// A bucket for a Go map. | |
const bucketCnt = 8 | |
type bmap struct { | |
tophash [abi.MapBucketCount]uint8 | |
} |
-
bmap 就是 map 中的桶,可以存储 8 组 key-value 对的数据,以及一个指向下一个溢出桶的指针
-
每组 key-value 对数据包含 key 高 8 位 hash 值 tophash,key 和 val 三部分
-
在代码层面之展示了 tophash 部分,但由于 tophash、key 和 val 的数据长度固定,因此可以通过内存地址偏移的方式寻找到后续的 key 数组、val 数组以及溢出桶指针
每个 bmap 表示一个桶,里面存放 8 个数据:
type bmap struct { | |
tophash [abi.MapBucketCount]uint8 | |
key | |
values | |
overflow | |
} |
- tophash: 哈希值的高 8 位
- key: 键(没在代码中,在编译时加入)
- elem: 值(没在代码中,在编译时加入)
- overflow: 溢出指针 (没在代码中,在编译时加入)
# 4. 构造方法 🔨
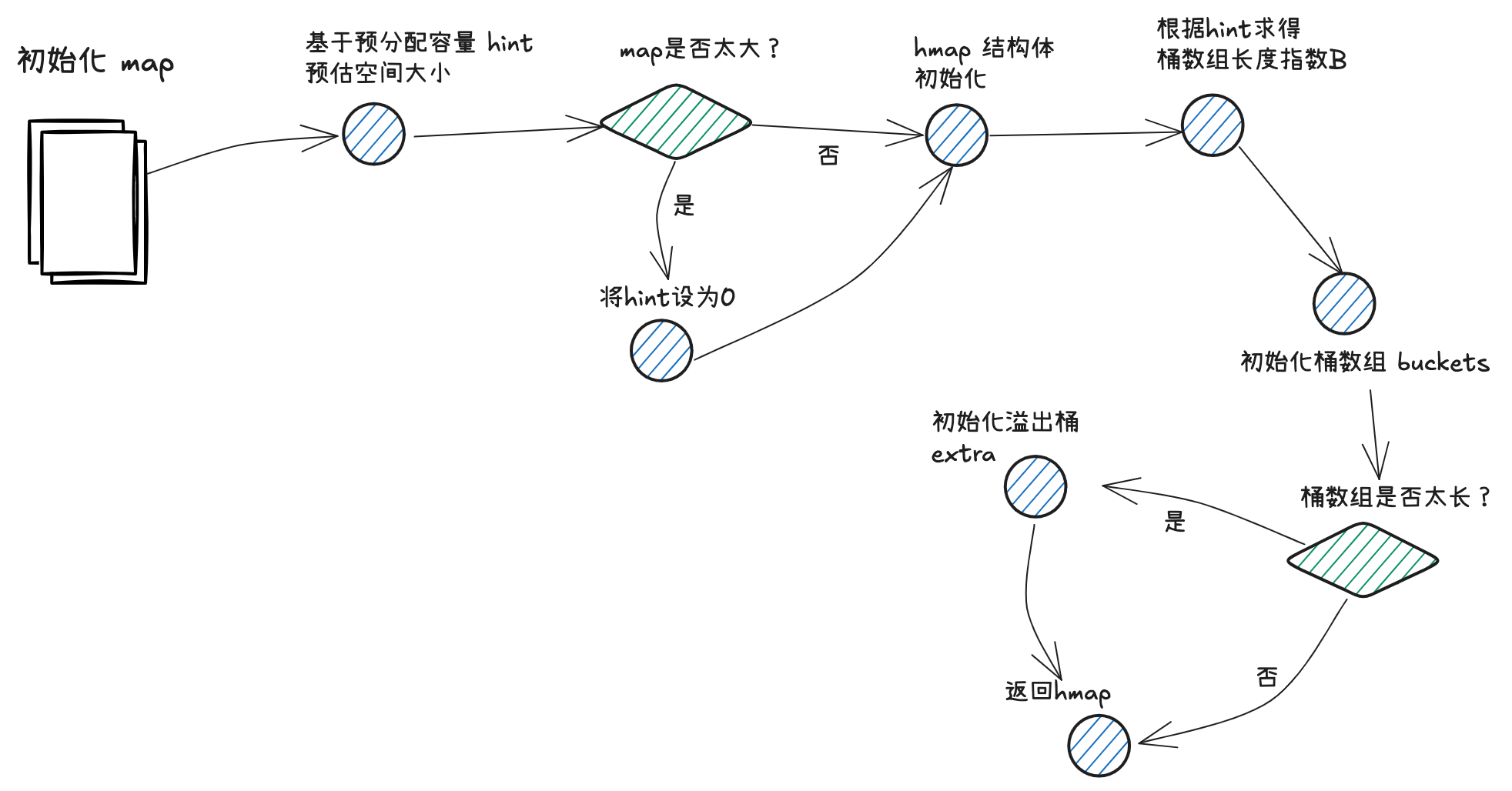
# 4.1 makemap 🏗️
func makemap(t *maptype, hint int, h *hmap) *hmap { | |
//hint 为 map 拟分配的容量;在分配前,会提前对拟分配的内存大小进行判断,倘若超限,会将 hint 置为零 | |
mem, overflow := math.MulUintptr(uintptr(hint), t.Bucket.Size_) | |
if overflow || mem > maxAlloc { | |
hint = 0 | |
} | |
// 通过 new 方法初始化 hmap | |
if h == nil { | |
h = new(hmap) | |
} | |
// 构造 hash 因子 | |
h.hash0 = uint32(rand()) | |
// 大致上基于 log2 (B) >= hint 的思路,计算桶数组的容量 B | |
B := uint8(0) | |
for overLoadFactor(hint, B) { | |
B++ | |
} | |
h.B = B | |
if h.B != 0 { | |
var nextOverflow *bmap | |
// 调用 makeBucketArray 方法,初始化桶数组 hmap.buckets | |
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil) | |
// 倘若 map 容量较大,会提前申请一批溢出桶 hmap.extra | |
if nextOverflow != nil { | |
h.extra = new(mapextra) | |
h.extra.nextOverflow = nextOverflow | |
} | |
} | |
return h | |
} |
# 4.2 overLoadFactor ⚖️
通过 overLoadFactor 方法,对 map 预分配容量和桶数组长度指数进行判断,决定是否仍需要增长 B 的数值
const loadFactorDen = 2 | |
const loadFactorNum = 13 | |
MapBucketCount = 1 << 3 | |
func overLoadFactor(count int, B uint8) bool { | |
return count > abi.MapBucketCount && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen) | |
} | |
func bucketShift(b uint8) uintptr { | |
// Masking the shift amount allows overflow checks to be elided. | |
return uintptr(1) << (b & (goarch.PtrSize*8 - 1)) | |
} |
(1) 如果 map 预分配容量小于等于 8,B 取 0,桶的个数为 1
(2) 保证 map 预分配容量大小等于桶数组长度 * 6.5
| kv 对数量 | 桶数组长度指数 B | 桶数组长度 2^B | |
|---|---|---|---|
| 0 ~ 8 | 0 | 1 | |
| 9 ~ 13 | 1 | 2 | |
| 14 ~ 26 | 2 | 4 | |
| 27 ~ 52 | 3 | 8 | |
| 2^(B-1) * 6.5+1 ~ 2^B*6.5 | B | 2^B | |
# 4.3 makeBucketArray 🪣
makeBucketArray 方法会进行桶数组的初始化,并根据桶的数量决定是否需要提前做溢出桶的初始化。
func makeBucketArray(t *maptype, b uint8, dirtyalloc unsafe.Pointer) (buckets unsafe.Pointer, nextOverflow *bmap) { | |
// 通过 base 记录桶数组的长度,不包含溢出桶; | |
// 通过 nbuckets 记录累加上溢出桶后,桶数组的总长度 | |
base := bucketShift(b) | |
nbuckets := base | |
// 桶数组的指数 b>=4 时(桶数组的数量 >=54),会需要提前创建溢出桶 | |
if b >= 4 { | |
nbuckets += bucketShift(b - 4) | |
sz := t.Bucket.Size_ * nbuckets | |
up := roundupsize(sz, !t.Bucket.Pointers()) | |
if up != sz { | |
nbuckets = up / t.Bucket.Size_ | |
} | |
} | |
if dirtyalloc == nil { | |
// 调用 newarray 方法为桶数组申请内存空间,连带着需要初始化的溢出桶 | |
buckets = newarray(t.Bucket, int(nbuckets)) | |
} else { | |
buckets = dirtyalloc | |
size := t.Bucket.Size_ * nbuckets | |
if t.Bucket.Pointers() { | |
memclrHasPointers(buckets, size) | |
} else { | |
memclrNoHeapPointers(buckets, size) | |
} | |
} | |
// 如果 base != bbuckets, 说明需要创建溢出桶,会基于地址偏移的方式,通过 nextOverflow 指向首个溢出桶的地址 | |
if base != nbuckets { | |
nextOverflow = (*bmap)(add(buckets, base*uintptr(t.BucketSize))) | |
last := (*bmap)(add(buckets, (nbuckets-1)*uintptr(t.BucketSize))) | |
last.setoverflow(t, (*bmap)(buckets)) | |
} | |
return buckets, nextOverflow | |
} | |
// 如果需要创建溢出桶,会在将最后一个溢出桶的 overflow 指针指向 buckets 数组,以次来表示申请的溢出桶已经用完 | |
func (b *bmap) setoverflow(t *maptype, ovf *bmap) { | |
*(**bmap)(add(unsafe.Pointer(b), uintptr(t.BucketSize)-goarch.PtrSize)) = ovf | |
} |
# 5. 读流程 📖
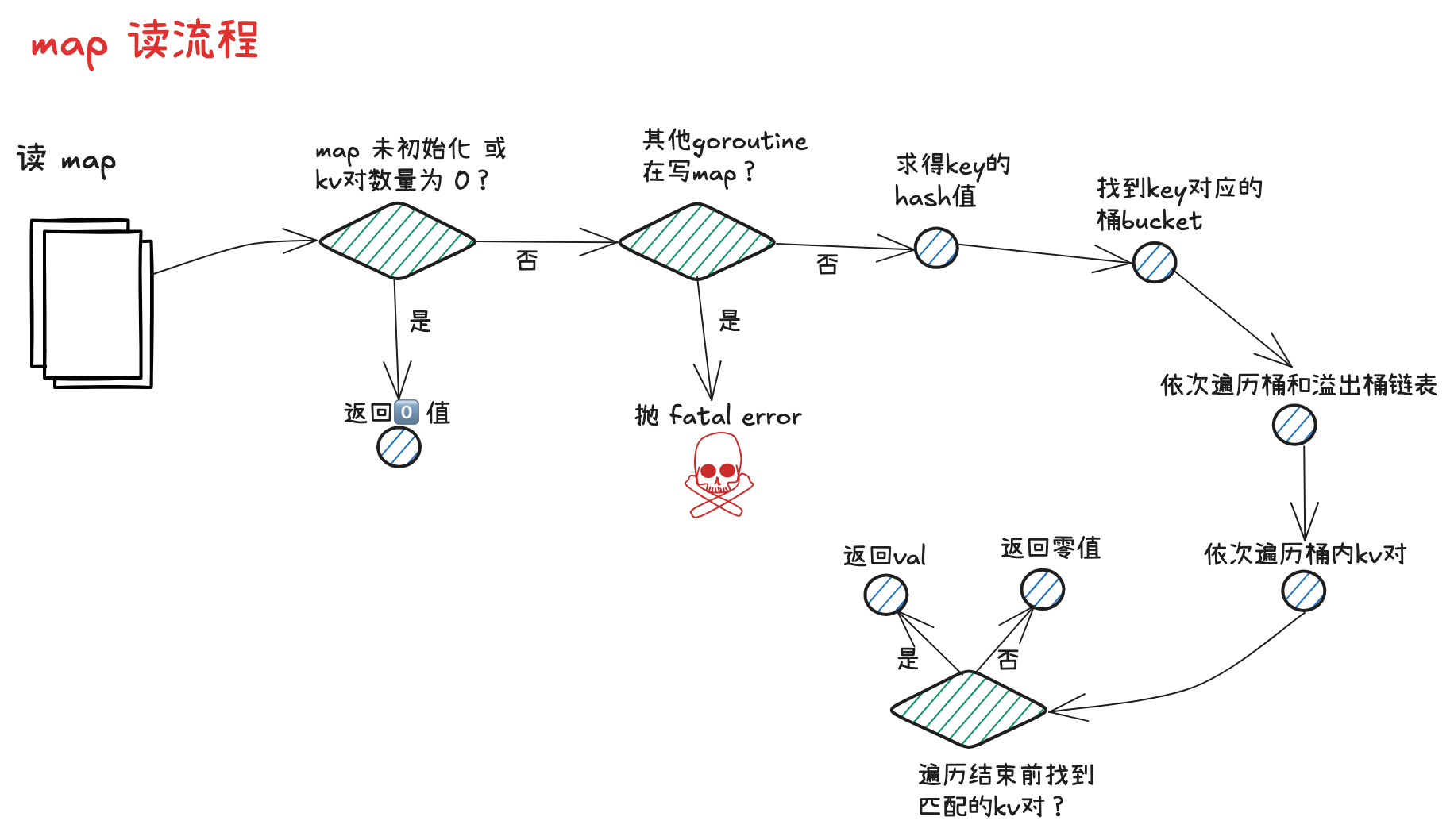
map 度流程大概分为以下几步:
- 根据 key 取得 hash 值
- 根据 hash 值对桶数组取模,确定所在的桶
- 沿着桶链表依次遍历各个桶内的 key-value 对
- 命中相同的 key,则返回 value;倘若 key 不存在,则返回零值。
func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer { | |
// 倘若 map 未初始化,或此时存在 key-value 对数量为 0,直接返回零值 | |
if h == nil || h.count == 0 { | |
if err := mapKeyError(t, key); err != nil { | |
panic(err) // see issue 23734 | |
} | |
return unsafe.Pointer(&zeroVal[0]) | |
} | |
// 如果发现其他 goroutine 在写 map,直接抛出并发读写的 fatal error;其中,并发写标志,位于 hmap.flags 的第 3 个 bit 位 | |
// const hashWriting = 4 | |
if h.flags&hashWriting != 0 { | |
fatal("concurrent map read and map write") | |
} | |
// 通过 maptype.hasher () 方法计算得到 key 的 hash 值,并对桶数组长度取模,取得对应的桶。 | |
// 关于 hash 方法的内部实现,golang 并未暴露 | |
hash := t.Hasher(key, uintptr(h.hash0)) | |
//bucketMask 方法会根据 B 求得桶数组长度 - 1 的值,用于后续 & 运算,实现取模的效果 | |
m := bucketMask(h.B) | |
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.BucketSize))) | |
// 在取桶时,会关注当前 map 是否处于扩容的流程 | |
// 倘若是,需要在老的桶数组 oldBuckets 中取桶,通过 evacuated 方法判断统数据是已迁到新桶还是仍存留在老桶中,如果仍在老桶,需要取老桶进行遍历 | |
if c := h.oldbuckets; c != nil { | |
// 在取老桶前,会先判断 map 的扩容流程是否增量扩容,倘若是,说明老桶数组的长度是新桶数组的一半,需要将桶长度 m 除以 2 | |
// const sameSizeGrow = 8 | |
if !h.sameSizeGrow() { | |
// There used to be half as many buckets; mask down one more power of two. | |
m >>= 1 | |
} | |
oldb := (*bmap)(add(c, (hash&m)*uintptr(t.BucketSize))) | |
if !evacuated(oldb) { | |
b = oldb | |
} | |
} | |
// 取 key hash 值的高 8 位值 top | |
top := tophash(hash) | |
// 开启两层 for 循环进行遍历流程,外层基于桶链表,依次遍历首个桶和后续的每个溢出桶,内层一次遍历一个桶内的 key-value 对 | |
bucketloop: | |
for ; b != nil; b = b.overflow(t) { | |
for i := uintptr(0); i < abi.MapBucketCount; i++ { | |
// 首先查询高 8 位的 tophash 值,看是否和 key 的 top 值匹配 | |
// 倘若不匹配且当前 tophash 值为 0,说明桶的后续位置都未放入过元素,当前 key 在 map 中不存在,可以直接打破循环,返回零值 | |
if b.tophash[i] != top { | |
if b.tophash[i] == emptyRest { | |
break bucketloop | |
} | |
continue | |
} | |
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.KeySize)) | |
if t.IndirectKey() { | |
k = *((*unsafe.Pointer)(k)) | |
} | |
// 若找到了相等的 key,则通过地址偏移的方式取到 value 并返回 | |
// 其中 dataOffset 为一个桶中 tophash 数组所占的空间大小 | |
if t.Key.Equal(key, k) { | |
e := add(unsafe.Pointer(b), dataOffset+abi.MapBucketCount*uintptr(t.KeySize)+i*uintptr(t.ValueSize)) | |
if t.IndirectElem() { | |
e = *((*unsafe.Pointer)(e)) | |
} | |
return e | |
} | |
} | |
} | |
// 倘若遍历完成,仍未找到匹配的目标,则返回零值兜底 | |
return unsafe.Pointer(&zeroVal[0]) | |
} | |
// 取老桶时,会调用 evacuated 方法判断数据是否已经迁移到新桶。 | |
// 判断的方式是,取桶中首个 tophash 值,倘若该值为 2,3,4 中的一个,都代表数据已经完成迁移 | |
// const emptyOne = 1 | |
// const evacuatedX = 2 | |
// const evacuatedY = 3 | |
// cosnt evacuatedEmpty = 4 | |
// cosnt minTopHash = 5 | |
func evacuated(b *bmap) bool { | |
h := b.tophash[0] | |
return h > emptyOne && h < minTopHash | |
} | |
// 取 key hash 值的高 8 位值 top. 倘若该值 < 5,会累加 5,以避开 0 ~ 4 的取值。因为这几个值会用于枚举,具有一些特殊的含义. | |
// const minTopHash = 5 | |
func tophash(hash uintptr) uint8 { | |
top := uint8(hash >> (goarch.PtrSize*8 - 8)) | |
if top < minTopHash { | |
top += minTopHash | |
} | |
return top | |
} |
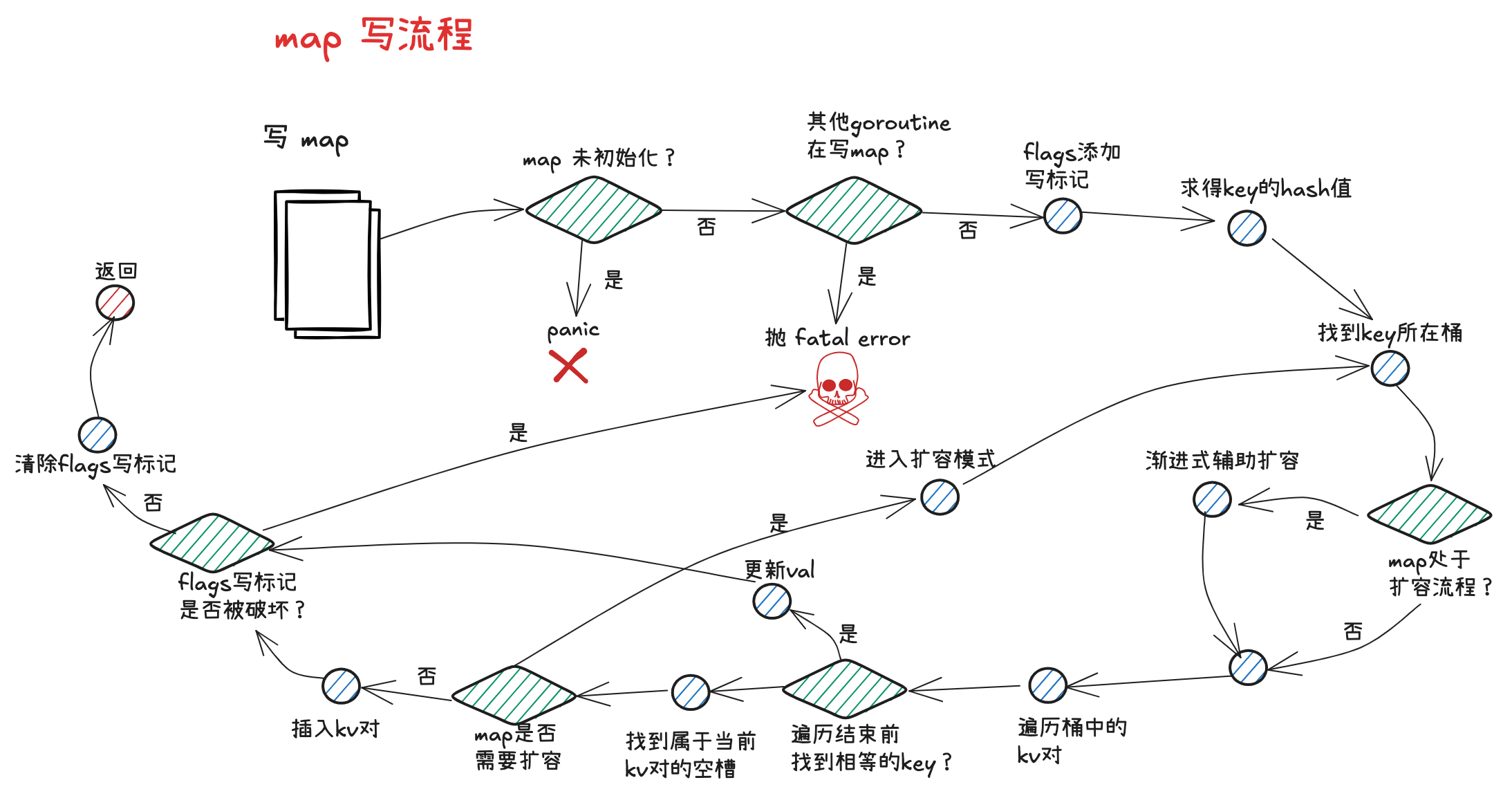
# 6. 写流程 ✍️
map 写流程主要分为以下几步:
- 根据 key 计算 hash 值
- 根据 hash 值对桶数组取模,确定所在的桶
- 如果 map 处于扩容,则迁移命中的桶,帮助推进渐进式扩容
- 沿着桶链表依次遍历各个桶内的 key-value 对
- 命中相同的 key,则更新 value;若 key 不存在,则插入新的 key-value 对
- 倘若发现 map 达成扩容条件,则会开启扩容模式,并重新返回第 2 步
map 写操作位于 runtime/map.go 的 mapassign 方法中,主要分为以下几步:
// 负载在 go 的 map 中插入或更新一个键值对,处理哈希冲突、扩容逻辑以及内存分配,是 map 写操作的核心实现。 | |
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer { | |
// 判空,如果 map 为 nil,直接 panic | |
if h == nil { | |
panic(plainError("assignment to entry in nil map")) | |
} | |
// 检查是否有并发写或者删除操作,抛出并发写 fatal error | |
if h.flags&hashWriting != 0 { | |
fatal("concurrent map writes") | |
} | |
// 通过 maptype.hasher () 计算 key 的哈希值 | |
hash := t.Hasher(key, uintptr(h.hash0)) | |
// Set hashWriting after calling t.hasher, since t.hasher may panic, | |
// in which case we have not actually done a write. | |
// 通过异或位运算,将 map.flags 的第 3 个 bit 位置为 1,添加写标志 | |
// 设置 hashWriting 标志,防止并发写(放在 hasher 后,避免 hasher panic 导致未初始化标志) | |
h.flags ^= hashWriting | |
// 如果 buckets 为 nil,分配初始 bucket | |
if h.buckets == nil { | |
h.buckets = newobject(t.Bucket) // newarray(t.Bucket, 1) | |
} | |
again: | |
// 找到当前 key 对应的桶索引 bucket | |
bucket := hash & bucketMask(h.B) | |
// 如果正在扩容,迁移当前 bucket 数据 | |
if h.growing() { | |
growWork(t, h, bucket) | |
} | |
// 从 map 的桶数组 buckets 出发,结合桶索引和桶容量大小,进行地址偏移,获得对应桶 b | |
b := (*bmap)(add(h.buckets, bucket*uintptr(t.BucketSize))) | |
// 计算该 key 对应的高 8 位 tophash 值 | |
top := tophash(hash) | |
// 提前声明好的三个指针,用于指向存放 key-value 的空槽 | |
var inserti *uint8 //tophash 拟插入的位置 | |
var insertk unsafe.Pointer //key 拟插入的位置 | |
var elem unsafe.Pointer //val 拟插入的位置 | |
// 开启两层 for 循环,外层沿着桶链表依次遍历,内层一次遍历桶内的 key-value 对 | |
bucketloop: | |
for { | |
// 遍历当前 bucket 中所有的槽位 | |
for i := uintptr(0); i < abi.MapBucketCount; i++ { | |
// 如果 key 的 tophash 和当前位置 tophash 不同,则会尝试将 inserti,insertk,elem 调整指向首个空位置,用于后续的插入操作 | |
if b.tophash[i] != top { | |
// 如果是新槽位且尚未找到插入点 | |
if isEmpty(b.tophash[i]) && inserti == nil { | |
inserti = &b.tophash[i] | |
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.KeySize)) | |
elem = add(unsafe.Pointer(b), dataOffset+abi.MapBucketCount*uintptr(t.KeySize)+i*uintptr(t.ValueSize)) | |
} | |
// 如果发现当前位置 tophash 标识位 emptyRest (0),则说明当前链表后续位置都为空,无需继续比那里,直接 break 遍历流程即可 | |
if b.tophash[i] == emptyRest { | |
break bucketloop | |
} | |
continue | |
} | |
// 如果找到了相等的 key,则执行更新操作,并且直接跳转到方法的 done 标志位处,进行收尾处理 | |
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.KeySize)) | |
if t.IndirectKey() { | |
k = *((*unsafe.Pointer)(k)) | |
} | |
if !t.Key.Equal(key, k) { | |
continue | |
} | |
// already have a mapping for key. Update it. | |
// 已存在 key,更新 key 和 value | |
if t.NeedKeyUpdate() { | |
typedmemmove(t.Key, k, key) | |
} | |
elem = add(unsafe.Pointer(b), dataOffset+abi.MapBucketCount*uintptr(t.KeySize)+i*uintptr(t.ValueSize)) | |
goto done | |
} | |
// 查找 overflow bucket | |
ovf := b.overflow(t) | |
if ovf == nil { | |
break | |
} | |
b = ovf | |
} | |
// 如果没有找到相等的 key,则会在执行插入操作前,判断 map 是否需要开启扩容模式 | |
// 倘若需要扩容,会在开启扩容模式后,跳转回 again 标志位,重新开始桶的定位以及遍历流程 | |
if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) { | |
hashGrow(t, h) | |
goto again // Growing the table invalidates everything, so try again | |
} | |
// 如果遍历完桶链表,都没有找到插入位置,则新建 overflow bucket,挂在在桶链表的尾部,并将 inserti,insertk,elem 指向溢出桶的首个空位 | |
if inserti == nil { | |
// The current bucket and all the overflow buckets connected to it are full, allocate a new one. | |
newb := h.newoverflow(t, b) | |
inserti = &newb.tophash[0] | |
insertk = add(unsafe.Pointer(newb), dataOffset) | |
elem = add(insertk, abi.MapBucketCount*uintptr(t.KeySize)) | |
} | |
// 将 tophash,key,value 插入到取得空位中,并且将 map 的 key-value 对计数器 count 值加 1 | |
if t.IndirectKey() { | |
kmem := newobject(t.Key) | |
*(*unsafe.Pointer)(insertk) = kmem | |
insertk = kmem | |
} | |
if t.IndirectElem() { | |
vmem := newobject(t.Elem) | |
*(*unsafe.Pointer)(elem) = vmem | |
} | |
typedmemmove(t.Key, insertk, key) | |
*inserti = top | |
h.count++ | |
// 收尾环节,再次检验是否有其他协程并发写,倘若有,则抛出 fatal error。将 hmap.flags 中的写标记抹去,然后退出方法 | |
done: | |
// 检查是否仍在写状态(防止并发问题) | |
if h.flags&hashWriting == 0 { | |
fatal("concurrent map writes") | |
} | |
// 清除 hashWriting 标志 | |
h.flags &^= hashWriting | |
// 如果 elem 是间接的,解引用 | |
if t.IndirectElem() { | |
elem = *((*unsafe.Pointer)(elem)) | |
} | |
return elem | |
} |
# newoverflow 🌊
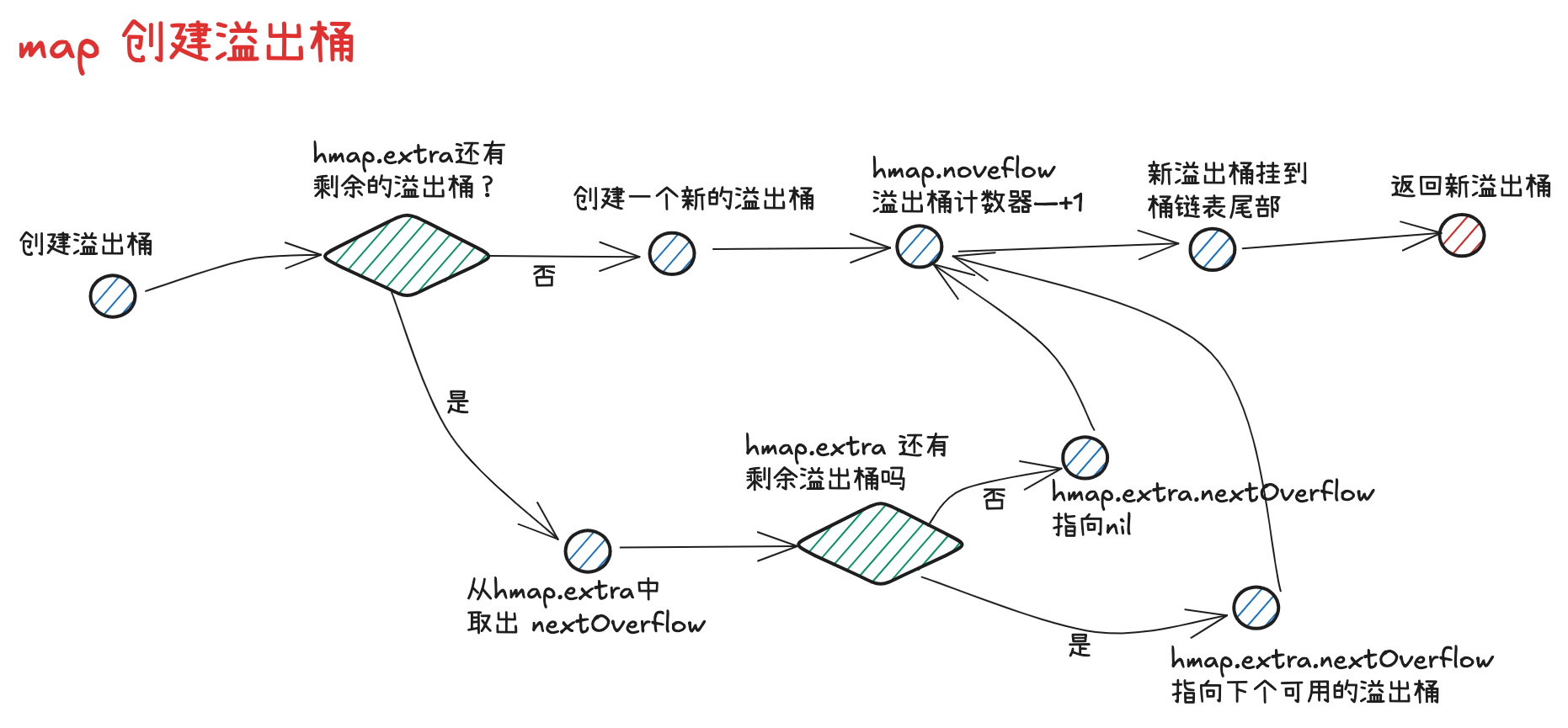
创建溢出桶:
- 如果 hmap.extra 中还有剩余可用的溢出桶,则直接获取 hmap.extra.nextOverflow,并将 nextOverflow 调整指向下一个空闲可用的溢出桶
- 如果 hmap 已经没有空闲溢出桶了,则创建一个新的溢出桶
- hmap 的溢出桶数量 hmap.noverflow 累加 1
- 将新获得的溢出桶添加到原桶链表的尾部
- 返回溢出桶
func (h *hmap) newoverflow(t *maptype, b *bmap) *bmap { | |
var ovf *bmap | |
if h.extra != nil && h.extra.nextOverflow != nil { | |
// We have preallocated overflow buckets available. | |
// See makeBucketArray for more details. | |
ovf = h.extra.nextOverflow | |
if ovf.overflow(t) == nil { | |
// We're not at the end of the preallocated overflow buckets. Bump the pointer. | |
h.extra.nextOverflow = (*bmap)(add(unsafe.Pointer(ovf), uintptr(t.BucketSize))) | |
} else { | |
// This is the last preallocated overflow bucket. | |
// Reset the overflow pointer on this bucket, | |
// which was set to a non-nil sentinel value. | |
ovf.setoverflow(t, nil) | |
h.extra.nextOverflow = nil | |
} | |
} else { | |
ovf = (*bmap)(newobject(t.Bucket)) | |
} | |
h.incrnoverflow() | |
if !t.Bucket.Pointers() { | |
h.createOverflow() | |
*h.extra.overflow = append(*h.extra.overflow, ovf) | |
} | |
b.setoverflow(t, ovf) | |
return ovf | |
} |
# 7. 删流程 🗑️
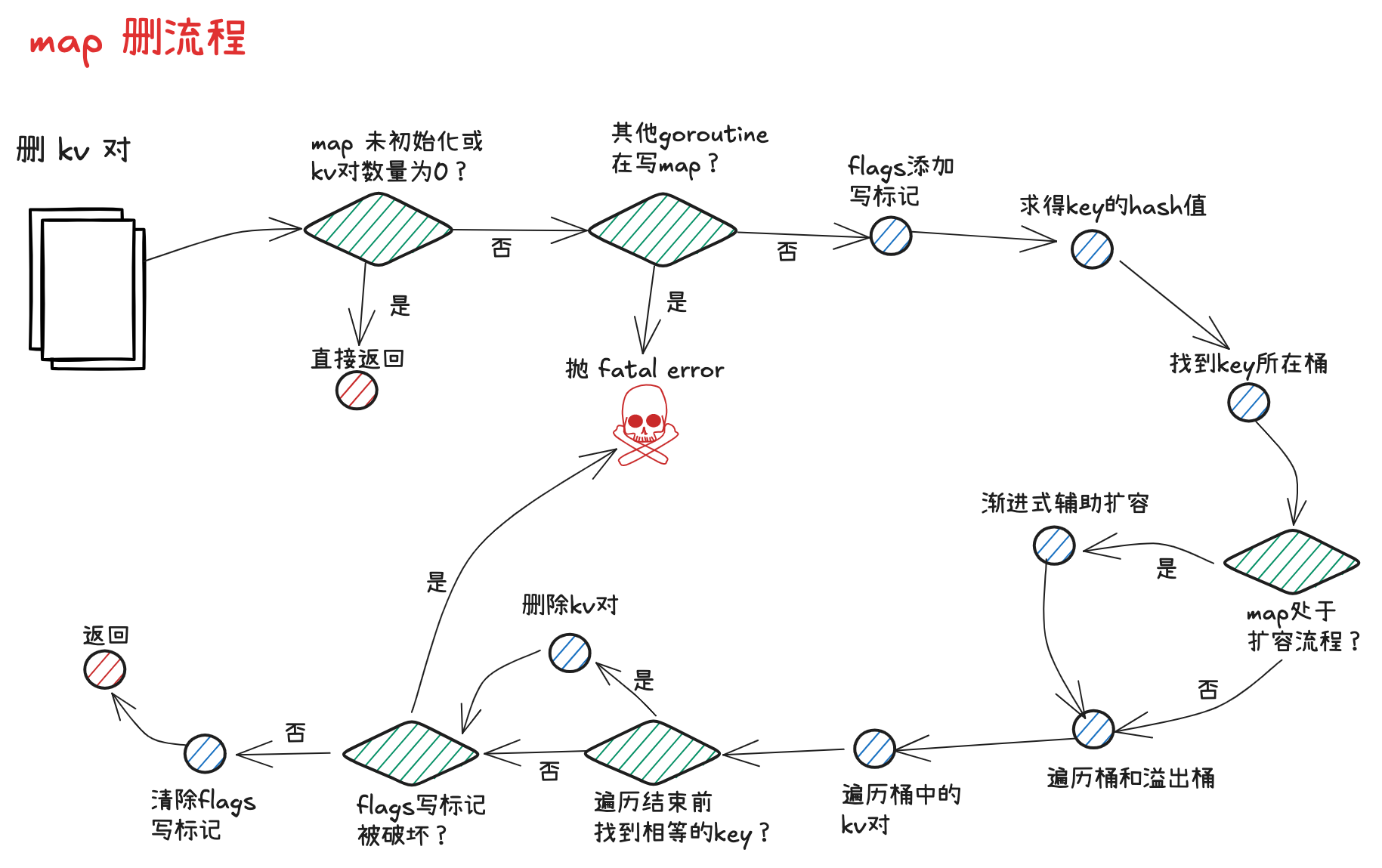
map 删除流程:
- 根据 key 计算 hash 值
- 根据 hash 值对桶数组取模,得到桶索引
- 如果 map 处于扩容,则迁移命中的桶,帮助推进渐进式扩容
- 沿着桶内链表依次遍历各个桶内的 key-value 对
- 如果命中相同的 key,删除对应的 key-value 对,并将当前的 tophash 置为 emptyOne,表示为空
- 如果当前位置位置,或者下一个位置的 tophash 为 emptyRest, 则沿当前位置向前遍历,将毗邻的 emptyOne 统一更新为 emptyRest
map 删除操作位于 runtime.map.go 的 mapdelete 方法中:
func mapdelete(t *maptype, h *hmap, key unsafe.Pointer) { | |
// 如果 map 未初始化或者内部 key-value 对数量为 0,删除时不会报错,直接返回 | |
if h == nil || h.count == 0 { | |
if err := mapKeyError(t, key); err != nil { | |
panic(err) // see issue 23734 | |
} | |
return | |
} | |
// 如果存在其他 goroutine 在进行写或者删操作,抛出并发写 fatal error | |
if h.flags&hashWriting != 0 { | |
fatal("concurrent map writes") | |
} | |
// 通过 maptype.hasher () 方法求得 key 对应的 hash 值 | |
hash := t.Hasher(key, uintptr(h.hash0)) | |
// Set hashWriting after calling t.hasher, since t.hasher may panic, | |
// in which case we have not actually done a write (delete). | |
// 通过异或位运算,将 map.flags 的第三个 bit 位 置为 1,添加写标记 | |
h.flags ^= hashWriting | |
// 找到当前 key 对应的桶索引 bucket | |
bucket := hash & bucketMask(h.B) | |
// 倘若发现当前 map 正处于扩容过程,则帮助其渐进扩容 | |
if h.growing() { | |
growWork(t, h, bucket) | |
} | |
// 从 map 的桶数组 buckets 出发,结合桶索引和桶容量大小,进行地址偏移,获得对应桶 b,并赋值给 bOrig | |
b := (*bmap)(add(h.buckets, bucket*uintptr(t.BucketSize))) | |
bOrig := b | |
// 取得 key 的高 8 位 tophash | |
top := tophash(hash) | |
// 开启两层 for 循环,外层沿着桶链表依次遍历,内层依次遍历桶内的 key-value 对 | |
search: | |
for ; b != nil; b = b.overflow(t) { | |
for i := uintptr(0); i < abi.MapBucketCount; i++ { | |
if b.tophash[i] != top { | |
// 遍历时,如果发现当前位置 tophash 值为 emptyRest,则直接结束遍历流程 | |
if b.tophash[i] == emptyRest { | |
break search | |
} | |
continue | |
} | |
// 如果 key 不相等,则继续遍历 | |
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.KeySize)) | |
k2 := k | |
if t.IndirectKey() { | |
k2 = *((*unsafe.Pointer)(k2)) | |
} | |
if !t.Key.Equal(key, k2) { | |
continue | |
} | |
// Only clear key if there are pointers in it. | |
// 如果 key 相等,删除对应的 key-value 对,并且将当前位置的 tophash 置为 emptyOne | |
if t.IndirectKey() { | |
*(*unsafe.Pointer)(k) = nil | |
} else if t.Key.Pointers() { | |
memclrHasPointers(k, t.Key.Size_) | |
} | |
e := add(unsafe.Pointer(b), dataOffset+abi.MapBucketCount*uintptr(t.KeySize)+i*uintptr(t.ValueSize)) | |
if t.IndirectElem() { | |
*(*unsafe.Pointer)(e) = nil | |
} else if t.Elem.Pointers() { | |
memclrHasPointers(e, t.Elem.Size_) | |
} else { | |
memclrNoHeapPointers(e, t.Elem.Size_) | |
} | |
b.tophash[i] = emptyOne | |
// If the bucket now ends in a bunch of emptyOne states, | |
// change those to emptyRest states. | |
// It would be nice to make this a separate function, but | |
// for loops are not currently inlineable. | |
// 倘若当前位置不位于最后一个桶的最后一个位置,或者当前位置的后置位 tophash 不为 emptyRest,则无需向前遍历更新 tophash 标识,直接跳转到 notLast 位置即可 | |
if i == abi.MapBucketCount-1 { | |
if b.overflow(t) != nil && b.overflow(t).tophash[0] != emptyRest { | |
goto notLast | |
} | |
} else { | |
if b.tophash[i+1] != emptyRest { | |
goto notLast | |
} | |
} | |
// 向前遍历,将沿途的空位 (tophash 为 emptyOne) 的 tophash 都更新为 emptySet | |
for { | |
b.tophash[i] = emptyRest | |
if i == 0 { | |
if b == bOrig { | |
break // beginning of initial bucket, we're done. | |
} | |
// Find previous bucket, continue at its last entry. | |
c := b | |
for b = bOrig; b.overflow(t) != c; b = b.overflow(t) { | |
} | |
i = abi.MapBucketCount - 1 | |
} else { | |
i-- | |
} | |
if b.tophash[i] != emptyOne { | |
break | |
} | |
} | |
// 如果成功从 map 中删除了一组 key-value 对,则将 hmap 的计数器 count 值减 1,如果 map 中的元素全部被删除完了,会为 map 更换一个新的随机因子 hash0 | |
notLast: | |
h.count-- | |
// Reset the hash seed to make it more difficult for attackers to | |
// repeatedly trigger hash collisions. See issue 25237. | |
if h.count == 0 { | |
h.hash0 = uint32(rand()) | |
} | |
break search | |
} | |
} | |
// 收尾环节,再次检验是否有其他协程并发写,如果有,则抛出 fatal error。 | |
// 将 hmap.flags 中的写标记抹去,然后退出方法 | |
if h.flags&hashWriting == 0 { | |
fatal("concurrent map writes") | |
} | |
h.flags &^= hashWriting | |
} |
# 8. 遍历流程 🔄
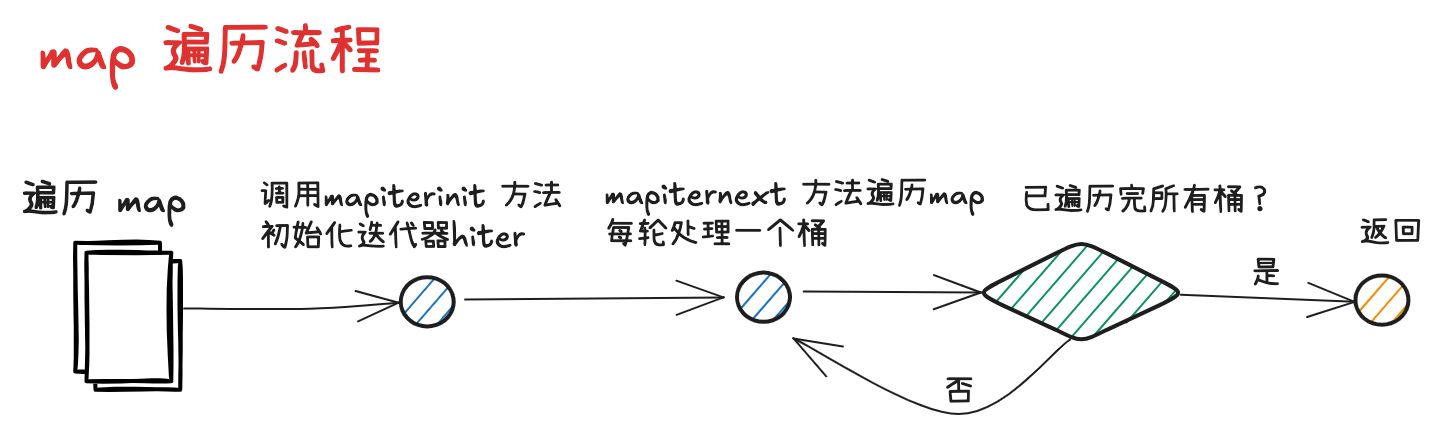
Map 的遍历流程首先会走进 runtime/map.go 的 mapiterinit () 方法中,初始化用于遍历的迭代器 hiter;
接着会调用 runtime/map.go 的 mapiternext () 方法开启遍历流程
# 8.1 迭代器数据结构 🔍
type hiter struct { | |
// 指向遍历得到的 key 的指针 | |
key unsafe.Pointer // Must be in first position. Write nil to indicate iteration end (see cmd/compile/internal/walk/range.go). | |
// 指向遍历得到的 value 的指针 | |
elem unsafe.Pointer // Must be in second position (see cmd/compile/internal/walk/range.go). | |
//map 类型,包含了 key,value 类型大小等信息 | |
t *maptype | |
//map 的指针 | |
h *hmap | |
//map 的桶数组 | |
buckets unsafe.Pointer // bucket ptr at hash_iter initialization time | |
// 当前遍历到的桶 | |
bptr *bmap // current bucket | |
// 新桶数组对应的溢出桶 | |
overflow *[]*bmap // keeps overflow buckets of hmap.buckets alive | |
// 老桶数组对应的溢出桶 | |
oldoverflow *[]*bmap // keeps overflow buckets of hmap.oldbuckets alive | |
// 遍历起始位置的桶索引 | |
startBucket uintptr // bucket iteration started at | |
// 遍历起始位置的 key-value 对索引 | |
offset uint8 // intra-bucket offset to start from during iteration (should be big enough to hold bucketCnt-1) | |
// 遍历是否穿越桶数组尾端回到头部了 | |
wrapped bool // already wrapped around from end of bucket array to beginning | |
// 桶数组的长度指数 | |
B uint8 | |
// 当前遍历到的 key-value 对在桶中的索引 | |
i uint8 | |
// 当前遍历到的桶 | |
bucket uintptr | |
// 因为扩容流程的存在,需要额外检查的桶 | |
checkBucket uintptr | |
} |
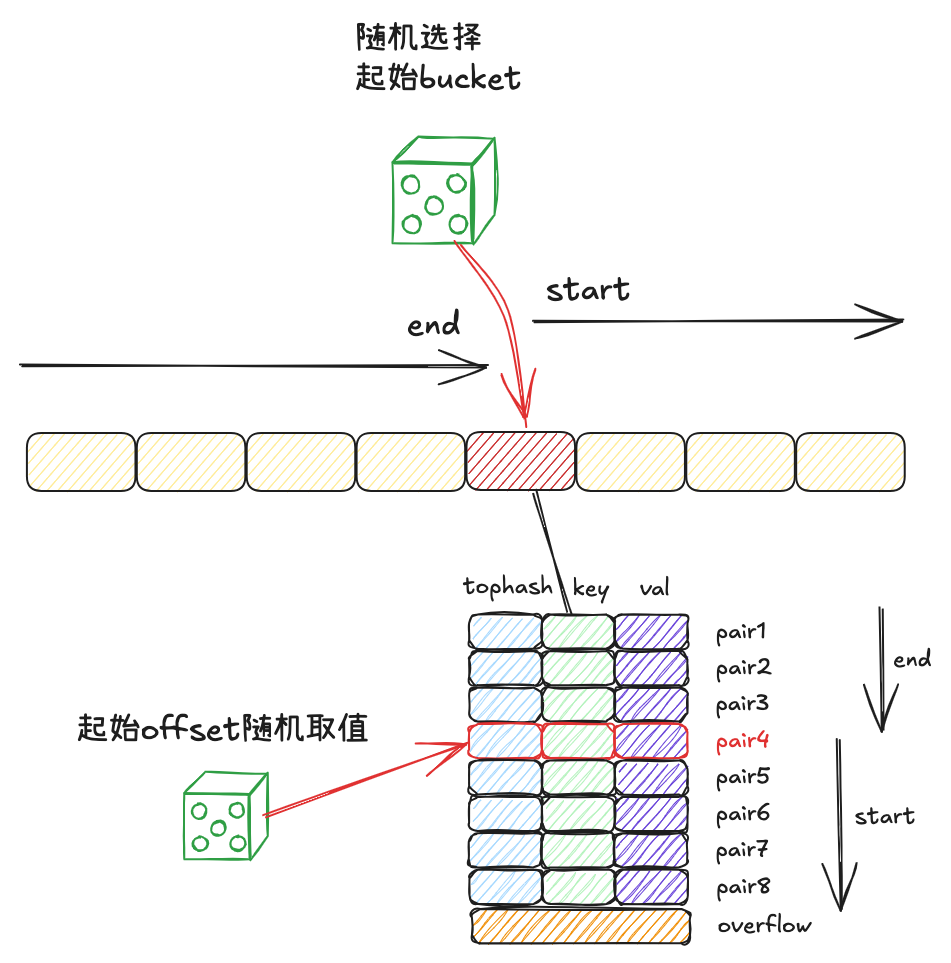
# 8.2 mapiterinit 🚀
map 遍历流程开始时,首先会走进 runtime/map.go 的 mapiterinit () 方法当中,此时会对创建 map 迭代器 hiter,并且 通过取随机数的方式,决定遍历的起始桶号,以及起始 key-value 对索引号.
func mapiterinit(t *maptype, h *hmap, it *hiter) { | |
it.t = t | |
if h == nil || h.count == 0 { | |
return | |
} | |
if unsafe.Sizeof(hiter{})/goarch.PtrSize != 12 { | |
throw("hash_iter size incorrect") // see cmd/compile/internal/reflectdata/reflect.go | |
} | |
it.h = h | |
// grab snapshot of bucket state | |
it.B = h.B | |
it.buckets = h.buckets | |
if !t.Bucket.Pointers() { | |
// Allocate the current slice and remember pointers to both current and old. | |
// This preserves all relevant overflow buckets alive even if | |
// the table grows and/or overflow buckets are added to the table | |
// while we are iterating. | |
h.createOverflow() | |
it.overflow = h.extra.overflow | |
it.oldoverflow = h.extra.oldoverflow | |
} | |
// decide where to start | |
// 通过取随机数的方式,决定遍历时的起始桶,以及桶中起始 key-value 对的位置 | |
r := uintptr(rand()) | |
it.startBucket = r & bucketMask(h.B) | |
it.offset = uint8(r >> h.B & (abi.MapBucketCount - 1)) | |
// iterator state | |
it.bucket = it.startBucket | |
// Remember we have an iterator. | |
// Can run concurrently with another mapiterinit(). | |
if old := h.flags; old&(iterator|oldIterator) != iterator|oldIterator { | |
atomic.Or8(&h.flags, iterator|oldIterator) | |
} | |
// 外层迭代器 hiter 中各项参数的初始化后,进入 mapiternext 方法开启遍历 | |
mapiternext(it) | |
} |
# 8.3 mapiternext ⏭️
func mapiternext(it *hiter) { | |
h := it.h | |
// 遍历时发现其他 goroutine 在并发写,直接抛出 fatal error | |
if h.flags&hashWriting != 0 { | |
fatal("concurrent map iteration and map write") | |
} | |
t := it.t | |
bucket := it.bucket | |
b := it.bptr | |
i := it.i | |
checkBucket := it.checkBucket | |
// 开启最外圈的循环,依次遍历桶数组中的每个桶链表,通过 next 和 goto next 关键字实现循环代码块 | |
next: | |
if b == nil { | |
// 如果已经遍历完所有的桶,重新回到初始桶位置,则直接结束方法 | |
if bucket == it.startBucket && it.wrapped { | |
// end of iteration | |
it.key = nil | |
it.elem = nil | |
return | |
} | |
// 如果 map 处于扩容流程,取桶时兼容新老桶数组的逻辑,如果桶处于旧桶数组且未完成迁移,需要将 checkBucket 置为当前的桶号 | |
if h.growing() && it.B == h.B { | |
// Iterator was started in the middle of a grow, and the grow isn't done yet. | |
// If the bucket we're looking at hasn't been filled in yet (i.e. the old | |
// bucket hasn't been evacuated) then we need to iterate through the old | |
// bucket and only return the ones that will be migrated to this bucket. | |
oldbucket := bucket & it.h.oldbucketmask() | |
b = (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.BucketSize))) | |
if !evacuated(b) { | |
checkBucket = bucket | |
} else { | |
b = (*bmap)(add(it.buckets, bucket*uintptr(t.BucketSize))) | |
checkBucket = noCheck | |
} | |
} else { | |
b = (*bmap)(add(it.buckets, bucket*uintptr(t.BucketSize))) | |
checkBucket = noCheck | |
} | |
// 遍历的桶号加 1,倘若来到桶数组末尾,则将桶号置为 0。将 key-value 对的遍历索引 i 置为 0 | |
bucket++ | |
if bucket == bucketShift(it.B) { | |
bucket = 0 | |
it.wrapped = true | |
} | |
i = 0 | |
} | |
// 依次遍历各个桶中每个 key-value 对 | |
for ; i < abi.MapBucketCount; i++ { | |
offi := (i + it.offset) & (abi.MapBucketCount - 1) | |
if isEmpty(b.tophash[offi]) || b.tophash[offi] == evacuatedEmpty { | |
// TODO: emptyRest is hard to use here, as we start iterating | |
// in the middle of a bucket. It's feasible, just tricky. | |
continue | |
} | |
k := add(unsafe.Pointer(b), dataOffset+uintptr(offi)*uintptr(t.KeySize)) | |
if t.IndirectKey() { | |
k = *((*unsafe.Pointer)(k)) | |
} | |
e := add(unsafe.Pointer(b), dataOffset+abi.MapBucketCount*uintptr(t.KeySize)+uintptr(offi)*uintptr(t.ValueSize)) | |
// 倘若遍历到的桶属于旧桶数组未迁移完成的桶,需要按照其在新桶中的顺序完成遍历. | |
// 比如,增量扩容流程中,旧桶中的 key-value 对最终应该被分散迁移到新桶数组的 x、y 两个区域,则此时遍历时,哪怕 key-value 对仍存留在旧桶中未完成迁移,遍历时也应该严格按照其在新桶数组中的顺序来执行. | |
if checkBucket != noCheck && !h.sameSizeGrow() { | |
if t.ReflexiveKey() || t.Key.Equal(k, k) { | |
hash := t.Hasher(k, uintptr(h.hash0)) | |
if hash&bucketMask(it.B) != checkBucket { | |
continue | |
} | |
} else { | |
if checkBucket>>(it.B-1) != uintptr(b.tophash[offi]&1) { | |
continue | |
} | |
} | |
} | |
if (b.tophash[offi] != evacuatedX && b.tophash[offi] != evacuatedY) || | |
!(t.ReflexiveKey() || t.Key.Equal(k, k)) { | |
it.key = k | |
if t.IndirectElem() { | |
e = *((*unsafe.Pointer)(e)) | |
} | |
it.elem = e | |
} else { | |
// 执行 mapaccessK 方法,基于读流程方法获取 key-value 对,通过迭代的 hiter 的 key、value 指针进行接收,用于对用户的遍历操作进行响应 | |
rk, re := mapaccessK(t, h, k) | |
if rk == nil { | |
continue // key has been deleted | |
} | |
it.key = rk | |
it.elem = re | |
} | |
it.bucket = bucket | |
if it.bptr != b { // avoid unnecessary write barrier; see issue 14921 | |
it.bptr = b | |
} | |
it.i = i + 1 | |
it.checkBucket = checkBucket | |
return | |
} | |
b = b.overflow(t) | |
i = 0 | |
goto next | |
} |
# 9. 扩容流程 📈
# 9.1 扩容类型 🔄
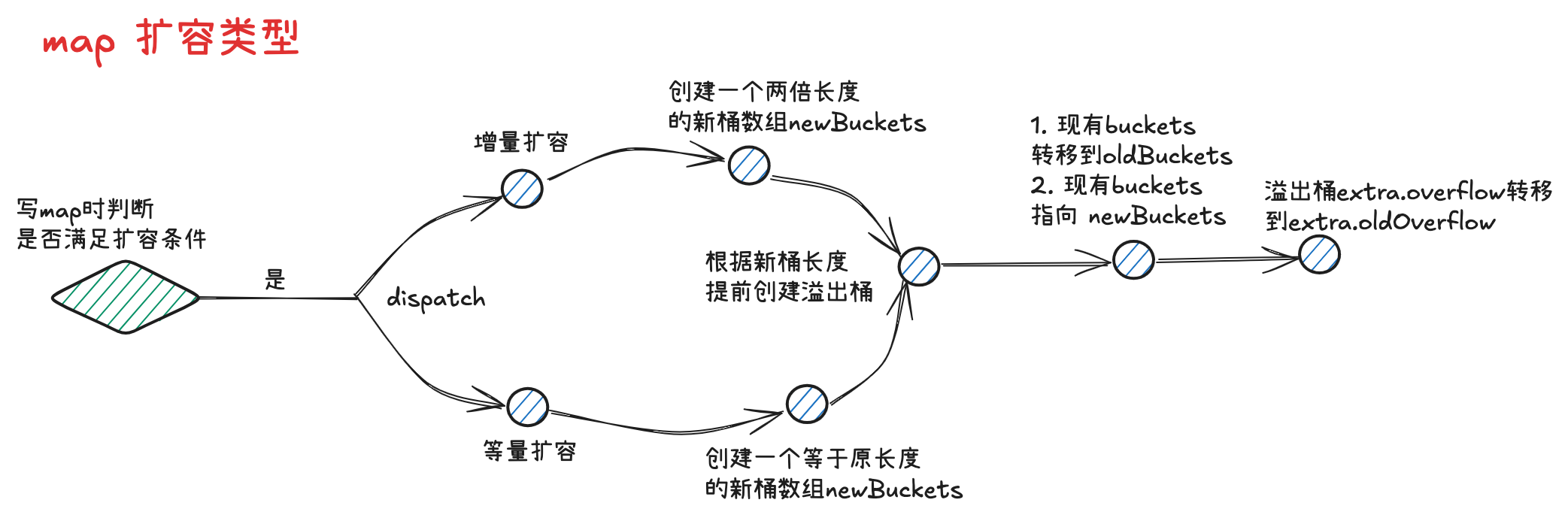
Map 的扩容类型分为两类,一类叫做增量扩容,一类叫做等量扩容
-
增量扩容
表现:扩容后,桶数组的长度增长为原长度的 2 倍
目的:降低每个桶中 key-value 对的数量,优化 map 操作的时间复杂度
-
等量扩容
表现:扩容后,桶数组的长度和之前保持一致,但溢出桶的数量会下降
目的:提高桶主体结构的数据填充率,减少溢出桶数量,避免发生内存泄漏
# 9.2 何时扩容 ⏰
-
只有 map 的写流程可能开启扩容模式
-
写 map 新插入 key-value 对之前,会发起是否需要扩容的逻辑判断:
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
// ......if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
goto again // Growing the table invalidates everything, so try again
}// ......} -
根据 hmap 的 oldbuckets 是否为空,可以判断 map 此前是否已开启扩容模式
func (h *hmap) growing() bool {
return h.oldbuckets != nil
} -
倘若此前未进入扩容模式,且 map 中 key-value 对的数量超过 8 个,且大于桶数组长度的 6.5 倍,则进入增量扩容
const (
loadFactorNum = 13
loadFactorDen = 2
)func overLoadFactor(count int, B uint8) bool {
return count > abi.MapBucketCount && uintptr(count) > loadFactorNum*(bucketShift(B)/loadFactorDen)
} -
倘若溢出桶的数量大于 2^B(即桶数组的长度;B 大于 15 时取 15),则进入等量扩容
func tooManyOverflowBuckets(noverflow uint16, B uint8) bool {
if B > 15 {
B = 15
}return noverflow >= uint16(1)<<(B&15)
}
# 9.3 如何开启扩容模式 🚀
开启扩容模式的方法位于 runtime/map.go 的 hashGrow 方法中
const sameSizeGrow = 8 | |
func hashGrow(t *maptype, h *hmap) { | |
// 如果是增量扩容,bigger 值取 1; | |
// 如果是等量扩容,bigger 值取 0,并将 hmap.flags 的第四个 bit 位置为 1,表示当前处于等量扩容流程 | |
bigger := uint8(1) | |
if !overLoadFactor(h.count+1, h.B) { | |
bigger = 0 | |
h.flags |= sameSizeGrow | |
} | |
// 将原桶数组赋值给 oldbuckets, 并创建新的桶数组和一批新的溢出桶 | |
// 此处会通过变量 bigger,实现不同扩容模式,新桶数组长度的区别处理 | |
oldbuckets := h.buckets | |
newbuckets, nextOverflow := makeBucketArray(t, h.B+bigger, nil) | |
// 更新 hmap 的桶数组长度指数 B,flag 标识,并将新、老桶数组赋值给 hmap.oldBuckets 和 hmap.buckets | |
// 扩容迁移进度 hmap.nevacuate 标记为 0 | |
// 新桶数组的溢出桶数量 hmap.noveflow 置为 0 | |
flags := h.flags &^ (iterator | oldIterator) | |
if h.flags&iterator != 0 { | |
flags |= oldIterator | |
} | |
// commit the grow (atomic wrt gc) | |
h.B += bigger | |
h.flags = flags | |
h.oldbuckets = oldbuckets | |
h.buckets = newbuckets | |
h.nevacuate = 0 | |
h.noverflow = 0 | |
// 将原本存量可用的溢出桶赋给 hmap.extra.oldoverflow | |
// 倘若存在下一个可用的溢出桶,赋给 hmap.extra.nextOverflow | |
if h.extra != nil && h.extra.overflow != nil { | |
// Promote current overflow buckets to the old generation. | |
if h.extra.oldoverflow != nil { | |
throw("oldoverflow is not nil") | |
} | |
h.extra.oldoverflow = h.extra.overflow | |
h.extra.overflow = nil | |
} | |
if nextOverflow != nil { | |
if h.extra == nil { | |
h.extra = new(mapextra) | |
} | |
h.extra.nextOverflow = nextOverflow | |
} | |
} |
# 9.4 扩容迁移规则 📋
增量扩容流程
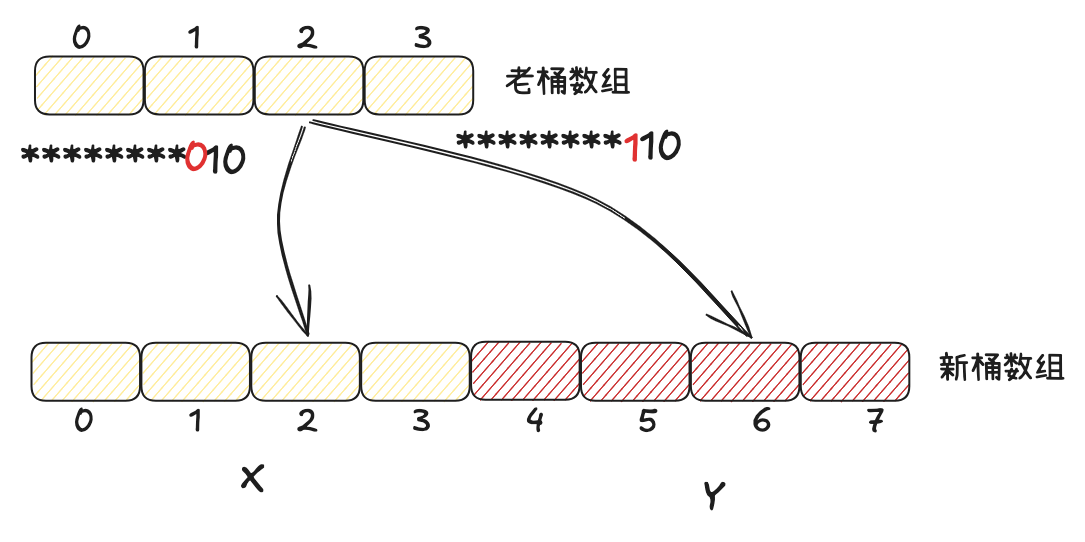
- 在等量扩容中,新桶数组长度与原桶数组相同, key-value 对在新桶数组和老桶数组的索引号保持一致
- 在增量扩容中,新桶数组长度为原桶数组的两倍,把新桶数组中桶号对应于老桶数组的区域称为 x 区域,新扩展的区域称为 y 区域
- 实际上,一个 key 属于哪个桶,取决于其 hash 值对桶数组长度取模得到的结果,因此依赖于其低位的 hash 值结果
- 在增量扩容流程中,新桶数组的长度会扩展一位,假定 key 原本从属的桶号为 i,则在新桶数组中从属的桶号只可能是 i(x 区域)或者 i + 老桶数组长度(y 区域)
- 当 key 低位 hash 值向左扩展一位的 bit 位为 0,则应该迁往 x 区域的 i 位置;如果该 bit 位为 1,应该迁往 y 区域对应的 i + 老桶数组长度的位置
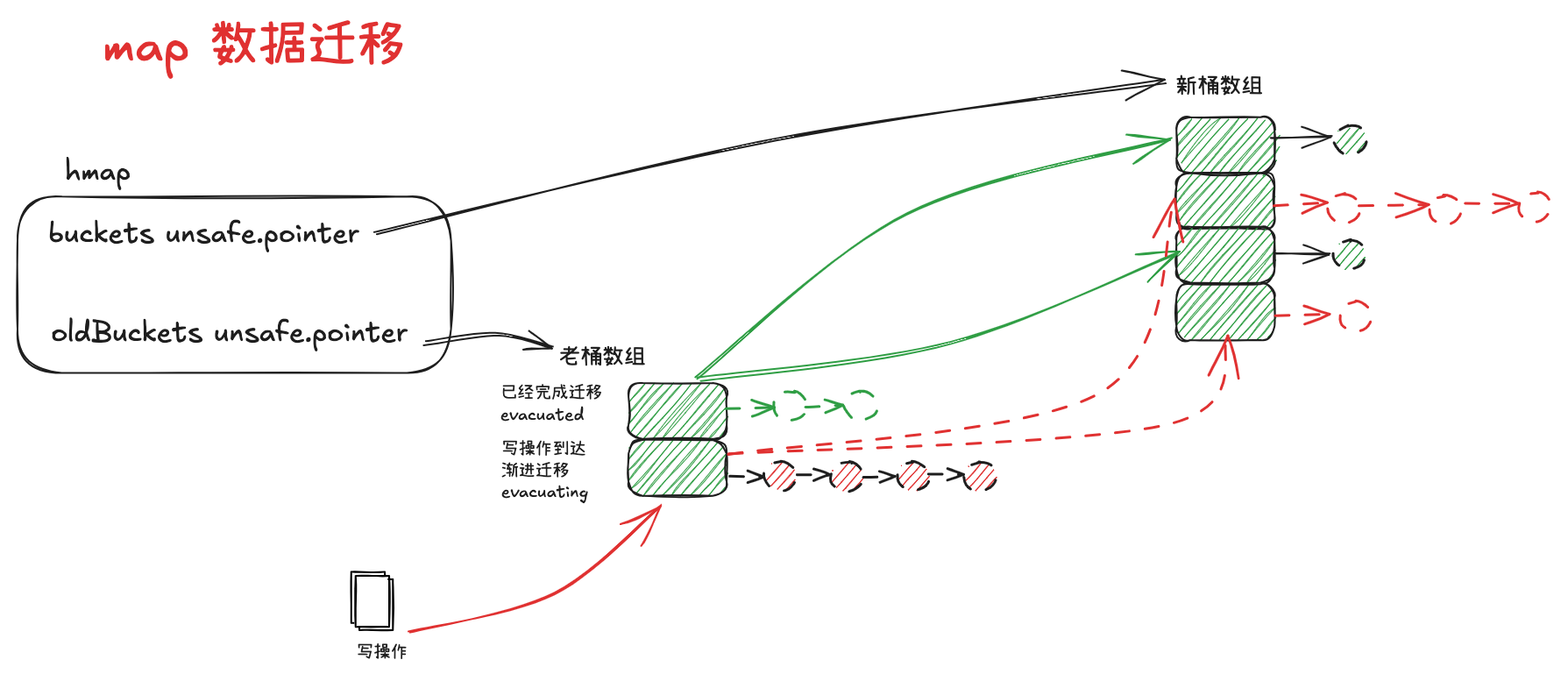
# 9.5 渐进式扩容 🐌
Map 采用的是渐进扩容的方式,避免因为一次性的全量数据迁移引发性能抖动
当每次触发写、删操作时,会为处于扩容流程中的 map 完成两组桶的数据迁移:
- 一组桶时当前写、删除操作所命中的桶
- 另一组桶时,当前未迁移的桶中,索引最小的哪个桶
func growWork(t *maptype, h *hmap, bucket uintptr) { | |
// make sure we evacuate the oldbucket corresponding | |
// to the bucket we're about to use | |
evacuate(t, h, bucket&h.oldbucketmask()) | |
// evacuate one more oldbucket to make progress on growing | |
if h.growing() { | |
evacuate(t, h, h.nevacuate) | |
} | |
} |
数据迁移的逻辑位于 runtime/map.go 的 evacuate 方法中:
// 入参中,oldbucket 为当前要迁移的桶在旧桶数组中的索引 | |
func evacuate(t *maptype, h *hmap, oldbucket uintptr) { | |
// 获取到待迁移桶的内存地址 b | |
b := (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.BucketSize))) | |
// 获取到旧桶数组的容量 newbit | |
newbit := h.noldbuckets() | |
//evacuated 方法判断出桶 b 是否已经迁移过了,未迁移过,才进入此 if 分支进行迁移处理 | |
if !evacuated(b) { | |
// 通过一个二元数组 xy 指向当前同可能迁移到的目的桶 | |
//x = xy [0], 代表新桶数组中索引和旧桶数组一致的桶 | |
//y = xy [1], 代表新桶数组中,索引为原索引加上旧桶容量的桶,只在增量扩容中会使用到 | |
var xy [2]evacDst | |
x := &xy[0] | |
x.b = (*bmap)(add(h.buckets, oldbucket*uintptr(t.BucketSize))) | |
x.k = add(unsafe.Pointer(x.b), dataOffset) | |
x.e = add(x.k, abi.MapBucketCount*uintptr(t.KeySize)) | |
// 只有进入增量扩容的分支,才需要对 y 进行初始化 | |
if !h.sameSizeGrow() { | |
// Only calculate y pointers if we're growing bigger. | |
// Otherwise GC can see bad pointers. | |
y := &xy[1] | |
y.b = (*bmap)(add(h.buckets, (oldbucket+newbit)*uintptr(t.BucketSize))) | |
y.k = add(unsafe.Pointer(y.b), dataOffset) | |
y.e = add(y.k, abi.MapBucketCount*uintptr(t.KeySize)) | |
} | |
// 外层 for 循环,遍历桶 b 和对应的溢出桶 | |
for ; b != nil; b = b.overflow(t) { | |
//k,e 分别记录遍历桶时,当前的 key 和 value 的指针 | |
k := add(unsafe.Pointer(b), dataOffset) | |
e := add(k, abi.MapBucketCount*uintptr(t.KeySize)) | |
// 遍历桶内的 key-value 对 | |
for i := 0; i < abi.MapBucketCount; i, k, e = i+1, add(k, uintptr(t.KeySize)), add(e, uintptr(t.ValueSize)) { | |
// 取每个位置的 tophash 值进行判断,倘若当前是个空位,则将当前位置 tophash 值置为 evacuatedEmpty, 开始遍历下一个位置 | |
top := b.tophash[i] | |
if isEmpty(top) { | |
b.tophash[i] = evacuatedEmpty | |
continue | |
} | |
if top < minTopHash { | |
throw("bad map state") | |
} | |
k2 := k | |
if t.IndirectKey() { | |
k2 = *((*unsafe.Pointer)(k2)) | |
} | |
// 寻找到迁移的目的桶 | |
// const evacuatedX = 2 | |
// const evacuatedY = 3 | |
var useY uint8 | |
if !h.sameSizeGrow() { | |
hash := t.Hasher(k2, uintptr(h.hash0)) | |
if h.flags&iterator != 0 && !t.ReflexiveKey() && !t.Key.Equal(k2, k2) { | |
useY = top & 1 | |
top = tophash(hash) | |
} else { | |
if hash&newbit != 0 { | |
useY = 1 | |
} | |
} | |
} | |
if evacuatedX+1 != evacuatedY || evacuatedX^1 != evacuatedY { | |
throw("bad evacuatedN") | |
} | |
b.tophash[i] = evacuatedX + useY // evacuatedX + 1 == evacuatedY | |
dst := &xy[useY] // evacuation destination | |
// 将 key-value 对迁移到目的桶中,并且更新目的桶结构内几个指针的指向 | |
if dst.i == abi.MapBucketCount { | |
dst.b = h.newoverflow(t, dst.b) | |
dst.i = 0 | |
dst.k = add(unsafe.Pointer(dst.b), dataOffset) | |
dst.e = add(dst.k, abi.MapBucketCount*uintptr(t.KeySize)) | |
} | |
dst.b.tophash[dst.i&(abi.MapBucketCount-1)] = top // mask dst.i as an optimization, to avoid a bounds check | |
if t.IndirectKey() { | |
*(*unsafe.Pointer)(dst.k) = k2 // copy pointer | |
} else { | |
typedmemmove(t.Key, dst.k, k) // copy elem | |
} | |
if t.IndirectElem() { | |
*(*unsafe.Pointer)(dst.e) = *(*unsafe.Pointer)(e) | |
} else { | |
typedmemmove(t.Elem, dst.e, e) | |
} | |
dst.i++ | |
dst.k = add(dst.k, uintptr(t.KeySize)) | |
dst.e = add(dst.e, uintptr(t.ValueSize)) | |
} | |
} | |
// Unlink the overflow buckets & clear key/elem to help GC. | |
if h.flags&oldIterator == 0 && t.Bucket.Pointers() { | |
b := add(h.oldbuckets, oldbucket*uintptr(t.BucketSize)) | |
// Preserve b.tophash because the evacuation | |
// state is maintained there. | |
ptr := add(b, dataOffset) | |
n := uintptr(t.BucketSize) - dataOffset | |
memclrHasPointers(ptr, n) | |
} | |
} | |
// 倘若当前迁移的桶是旧桶数组未迁移的桶中索引最小的一个,则 hmap.nevacuate 累加 1 | |
// 倘若已经迁移完所有的旧桶,则会确保 hmap.flags 中,等量扩容的标识被置为 0 | |
if oldbucket == h.nevacuate { | |
advanceEvacuationMark(h, t, newbit) | |
} | |
} |
type evacDst struct { | |
b *bmap // current destination bucket | |
i int // key/elem index into b | |
k unsafe.Pointer // pointer to current key storage | |
e unsafe.Pointer // pointer to current elem storage | |
} |
- evacDst.b: 目的地所在桶
- evacDst.i: 即将入桶的 key-value 对在桶中的索引
- evacDst.k: 入桶 key 的存储指针
- evacDst.e: 入桶 value 的存储指针
func advanceEvacuationMark(h *hmap, t *maptype, newbit uintptr) { | |
h.nevacuate++ | |
stop := h.nevacuate + 1024 | |
if stop > newbit { | |
stop = newbit | |
} | |
for h.nevacuate != stop && bucketEvacuated(t, h, h.nevacuate) { | |
h.nevacuate++ | |
} | |
if h.nevacuate == newbit { | |
h.oldbuckets = nil | |
if h.extra != nil { | |
h.extra.oldoverflow = nil | |
} | |
h.flags &^= sameSizeGrow | |
} | |
} |
# sync.map 🔒
# 1. 核心数据结构 🏗️
# 1.1 sync.Map
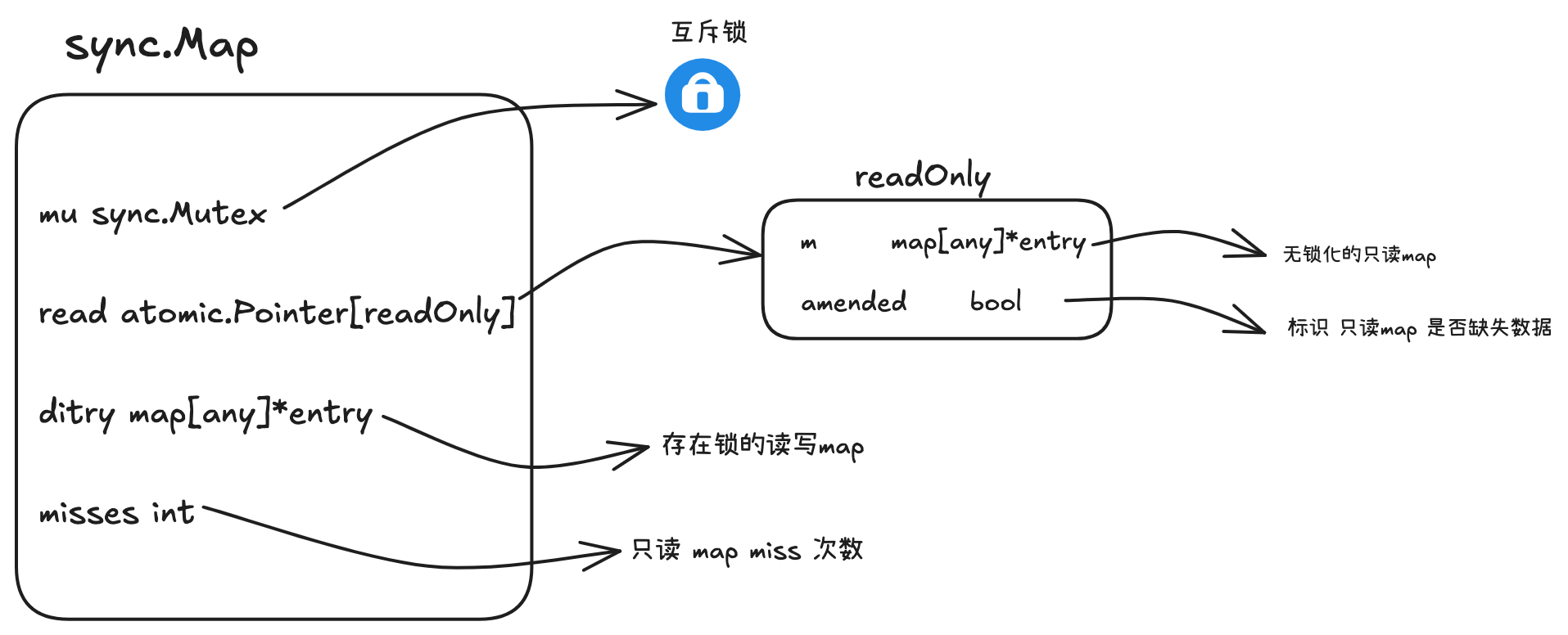
type Map struct { | |
// 互斥锁 | |
mu Mutex | |
// 高性能只读 map | |
// 多数情况下,读取都命中它(因为它原子可读) | |
read atomic.Pointer[readOnly] | |
// 用来保存新增、更新的 key | |
// 只有当 key 不在 read 时,才写入 dirty | |
// 在读取 miss 达到阈值时,dirty 会合并到 read 中 | |
dirty map[any]*entry | |
// 每次从 read 未命中但在 dirty 找到时,misses++ | |
// 如果 misses >= len (dirty),说明 read 太旧了,就同步 dirty->read | |
misses int //cache miss 次数 | |
} |
sync.Map 的特点是 冗余了两份 map:read map 和 dirty map,通过互斥锁保证并发安全,通过原子指针实现无锁读写,通过 misses 计数触发 read 和 dirty 的合并。
# 1.2 entry 及对应的几种状态 📝
type entry struct { | |
// 每个 key 对应的值是一个 entry | |
// 使用原子指针包装实际值,实现无所读写(更新时加锁,读取时无锁) | |
p atomic.Pointer[any] | |
} |
kv 对中的 value,统一采用 unsafe.Pointer 的形式进行存储,通过 entry.p 的指针进行链接
entry.p 的指向分为三种情况:
-
存活态:正常指向元素
即 key-entry 对仍未删除
-
软删除态:指向 nil
read map 和 dirty map 底层的 map 结构仍存在 key-entry 对,但在逻辑上该 key-entry 已经被删除,因此无法被用户查询到
-
硬删除态:指向固定的全局变量 expunged
ditry map 中已不存在该 key-entry 对
var expunged = unsafe.Pointer(new(any))
# 1.3 readOnly 📖
type readOnly struct { | |
m map[any]*entry // 真正意义上的 read map,实现从 key 到 entry 的映射 | |
amended bool // 表示 dirty map 是否包含 read map 没有的 key | |
} |
sync.Map 中只读 map:read 内部包含两个成员属性
- m:真正意义上的 read map,实现从 key 到 entry 的映射
- amended:表示 read map 中的 key-entry 对是否存在缺失,需要通过 dirty map 兜底
# 2. 读流程 📖
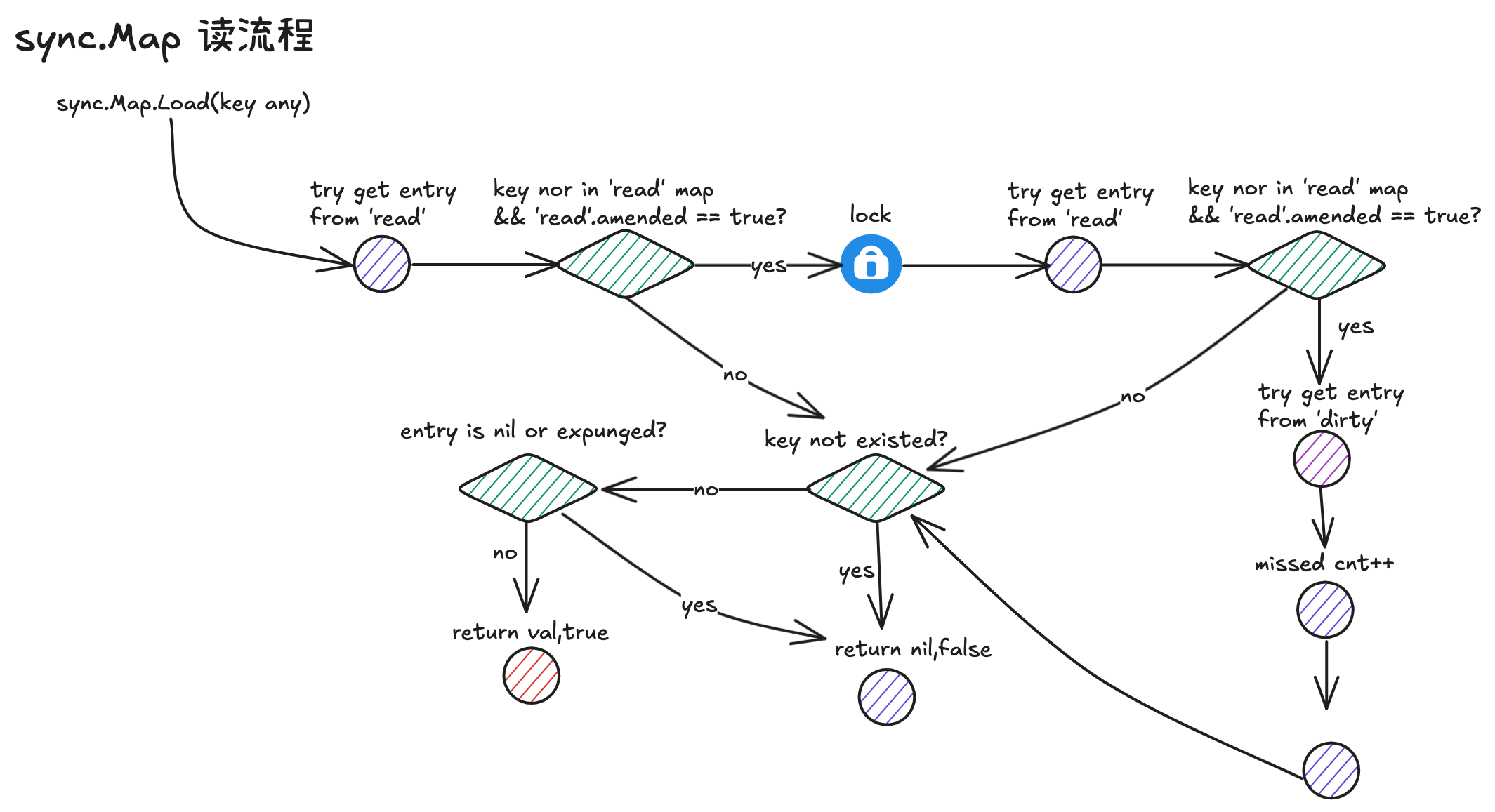
# 2.1 sync.Map.Load() 📖
func (m *Map) Load(key any) (value any, ok bool) { | |
read := m.loadReadOnly() | |
e, ok := read.m[key] | |
if !ok && read.amended { | |
m.mu.Lock() | |
read = m.loadReadOnly() | |
e, ok = read.m[key] | |
if !ok && read.amended { | |
e, ok = m.dirty[key] | |
m.missLocked() | |
} | |
m.mu.Unlock() | |
} | |
if !ok { | |
return nil, false | |
} | |
return e.load() | |
} |
- 查看 read map 中是否存在 key-entry 对,若存在,则直接读取 entry 返回;
- 倘若第一轮 read map 查询 miss,且 read map 不全,则需要加锁 double check;
- 第二轮 read map 查询仍 miss(加锁后),且 read map 不全,则查询 dirty map 兜底;
- 查询操作涉及到与 dirty map 的交互,misses 加一;
- 解锁,返回查得的结果.
# 2.2 entry.load() 📖
func (e *entry) load() (value any, ok bool) { | |
p := e.p.Load() | |
if p == nil || p == expunged { | |
return nil, false | |
} | |
return *p, true | |
} |
- sync.Map 中,kv 对的 value 是基于 entry 指针封装的形式;
- 从 map 取得 entry 后,最终需要调用 entry.load 方法读取指针指向的内容;
- 倘若 entry 的指针状态为 nil 或者 expunged,说明 key-entry 对已被删除,则返回 nil;
- 倘若 entry 未被删除,则读取指针内容,并且转为 any 的形式进行返回.
# 2.3 sync.Map.missLocked() ⚡
func (m *Map) missLocked() { | |
m.misses++ | |
if m.misses < len(m.dirty) { | |
return | |
} | |
m.read.Store(&readOnly{m: m.dirty}) | |
m.dirty = nil | |
m.misses = 0 | |
} |
- 在读流程中,倘若未命中 read map,且由于 read map 内容存在缺失需要和 dirty map 交互时,会走进 missLocked 流程;
- 在 missLocked 流程中,首先 misses 计数器累加 1;
- 倘若 miss 次数小于 dirty map 中存在的 key-entry 对数量,直接返回即可;
- 倘若 miss 次数大于等于 dirty map 中存在的 key-entry 对数量,则使用 dirty map 覆盖 read map,并将 read map 的 amended flag 置为 false;
- 新的 dirty map 置为 nil,misses 计数器清零.
# 3. 写流程 ✍️
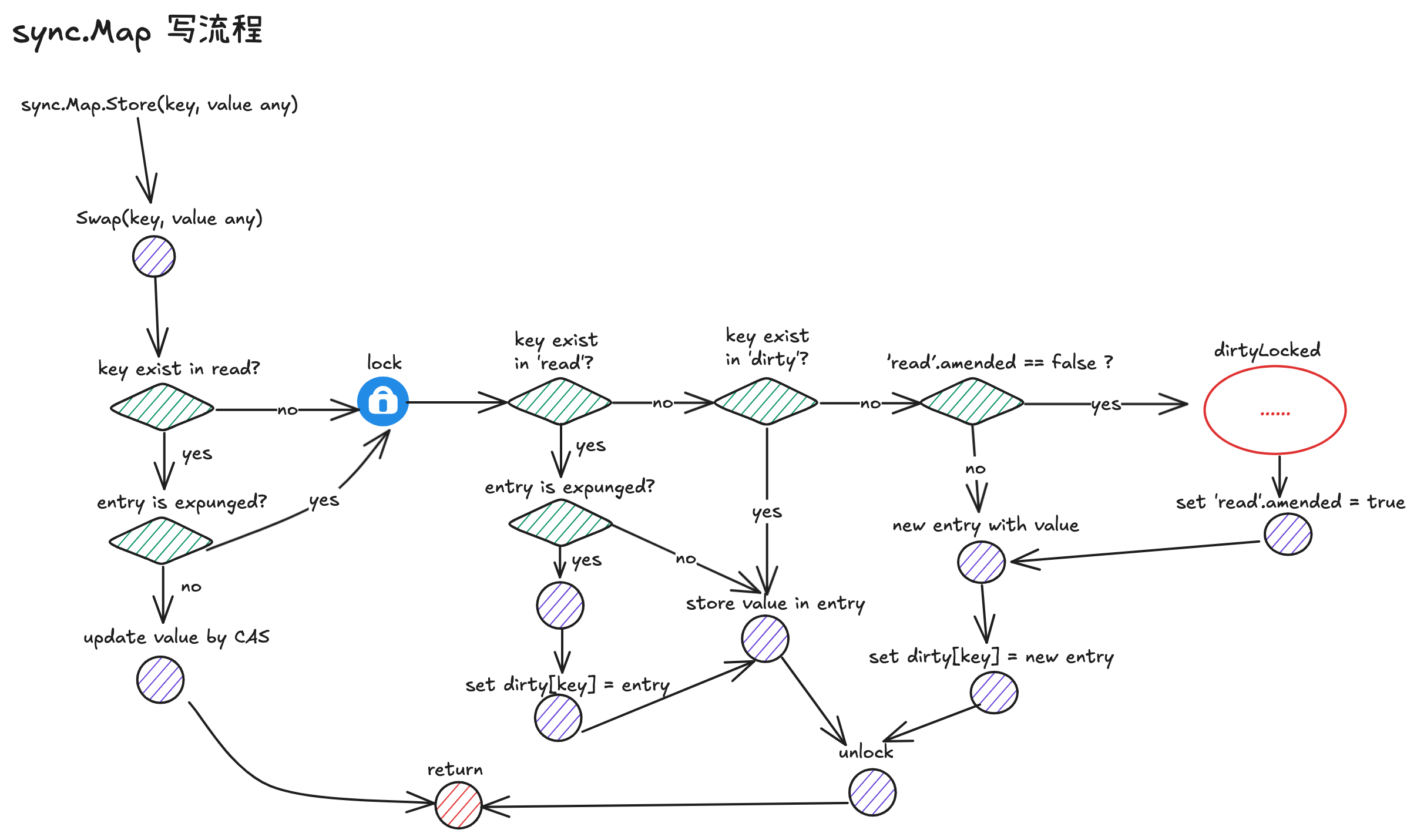
# 3.1 sync.Map.Store() ✍️
// Store 方法是对 Swap 的封装,用于存储键值对 | |
// 它忽略了 Swap 返回的之前的值和是否存在的标志 | |
func (m *Map) Store(key, value any) { | |
_, _ = m.Swap(key, value) | |
} | |
// Swap 方法用于原子地替换键对应的值 | |
// 返回之前的值(如果存在)和一个表示键是否存在的布尔值 | |
//previous: 之前的值(如果键不存在则为 nil) | |
//loaded: 如果键存在为 true,否则为 false | |
func (m *Map) Swap(key, value any) (previous any, loaded bool) { | |
// 首先尝试从只读 map 中读取 | |
read := m.loadReadOnly() | |
if e, ok := read.m[key]; ok { | |
// 如果键存在于只读 map 中,尝试直接替换值 | |
//trySwap 是无锁操作,成功则直接返回 | |
if v, ok := e.trySwap(&value); ok { | |
if v == nil { | |
return nil, false | |
} | |
return *v, true | |
} | |
} | |
// 如果无锁操作失败,需要加锁进行处理 | |
m.mu.Lock() | |
read = m.loadReadOnly() // 重新获取只读 map,因为可能在加锁期间被其他 goroutine 修改 | |
if e, ok := read.m[key]; ok { | |
// 键存在于只读 map 中 | |
if e.unexpungeLocked() { | |
// 如果元素被标记为删除,则恢复它并添加到 dirty map | |
m.dirty[key] = e | |
} | |
// 替换值并更新返回状态 | |
if v := e.swapLocked(&value); v != nil { | |
loaded = true | |
previous = *v | |
} | |
} else if e, ok := m.dirty[key]; ok { | |
// 键存在于 dirty map 中 | |
// 替换值并更新返回状态 | |
if v := e.swapLocked(&value); v != nil { | |
loaded = true | |
previous = *v | |
} | |
} else { | |
// 键既不在只读 map 也不在 dirty map 中 | |
if !read.amended { | |
// 如果这是第一次向 dirty map 添加新键 | |
// 需要创建 dirty map 的副本并标记 read map 为不完整 | |
m.dirtyLocked() | |
m.read.Store(&readOnly{m: read.m, amended: true}) | |
} | |
// 在 dirty map 中创建新条目 | |
m.dirty[key] = newEntry(value) | |
} | |
m.mu.Unlock() | |
return previous, loaded | |
} |
# 3.2 trySwap 🔄
func (m *Map) Swap(key, value any) (previous any, loaded bool) { | |
read := m.loadReadOnly() | |
if e, ok := read.m[key]; ok { | |
if v, ok := e.trySwap(&value); ok { | |
if v == nil { | |
return nil, false | |
} | |
return *v, true | |
} | |
} | |
m.mu.Lock() | |
// ... | |
} | |
func (e *entry) trySwap(i *any) (*any, bool) { | |
for { | |
p := e.p.Load() | |
if p == expunged { | |
return nil, false | |
} | |
if e.p.CompareAndSwap(p, i) { | |
return p, true | |
} | |
} | |
} |
- 在写流程中,让若发现 read map 中已存在对应的 key-entry 对,则会对调用 trySwap 方法尝试进行更新
- 让若 entry 为 expunged 态,说明已被硬删除,dirty 中缺失该项数据,因此 trySwap 执行失败
- 倘若 entry 为非 expunged 态,则直接执行 CAS 操作完成值的更新即可
# 3.3 entry.unexpungeLocked() 🔓
func (m *Map) Swap(key, value any) (previous any, loaded bool) { | |
// ...... | |
m.mu.Lock() | |
read = m.loadReadOnly() | |
if e, ok := read.m[key]; ok { | |
if e.unexpungeLocked() { | |
m.dirty[key] = e | |
} | |
if v := e.swapLocked(&value); v != nil { | |
loaded = true | |
previous = *v | |
} | |
} | |
// ...... | |
} | |
func (e *entry) unexpungeLocked() (wasExpunged bool) { | |
return e.p.CompareAndSwap(expunged, nil) | |
} |
- 在写流程加锁 double check 的过程中,倘若发现 read map 中存在对应的 key-entry 对,会执行该方法
- 倘若 key-entry 为硬删除 expunged 态,该方法 hi 基于 CAS 操作将其更新为软删除 nil 态,然后进一步 dirty map 中对齐该 key-entry 对,实现从硬删除到软删除的恢复
# 3.4 entry.swapLocked() 🔄
func (m *Map) Swap(key, value any) (previous any, loaded bool) { | |
// ...... | |
m.mu.Lock() | |
read = m.loadReadOnly() | |
if e, ok := read.m[key]; ok { | |
//...... | |
} else if e, ok := m.dirty[key]; ok { | |
if v := e.swapLocked(&value); v != nil { | |
loaded = true | |
previous = *v | |
} | |
} | |
// ...... | |
} | |
func (e *entry) swapLocked(i *any) *any { | |
return e.p.Swap(i) | |
} |
写流程中,倘若 read map 或者 dirty map 存在对应 key-entry,最终会通过原子操作,将新值的指针存储到 entry.p 当中
# 3.5 sync.Map.dirtyLocked() 🧹
// 与 missLocked () 方法对应 | |
func (m *Map) dirtyLocked() { | |
if m.dirty != nil { | |
return | |
} | |
// 将 read map 中的数据拷贝回 dirty map | |
read := m.loadReadOnly() | |
m.dirty = make(map[any]*entry, len(read.m)) | |
for k, e := range read.m { | |
// 过滤掉删除态的数据 | |
if !e.tryExpungeLocked() { | |
m.dirty[k] = e | |
} | |
} | |
} | |
func (e *entry) tryExpungeLocked() (isExpunged bool) { | |
p := e.p.Load() | |
for p == nil { | |
if e.p.CompareAndSwap(nil, expunged) { | |
return true | |
} | |
p = e.p.Load() | |
} | |
return p == expunged | |
} |
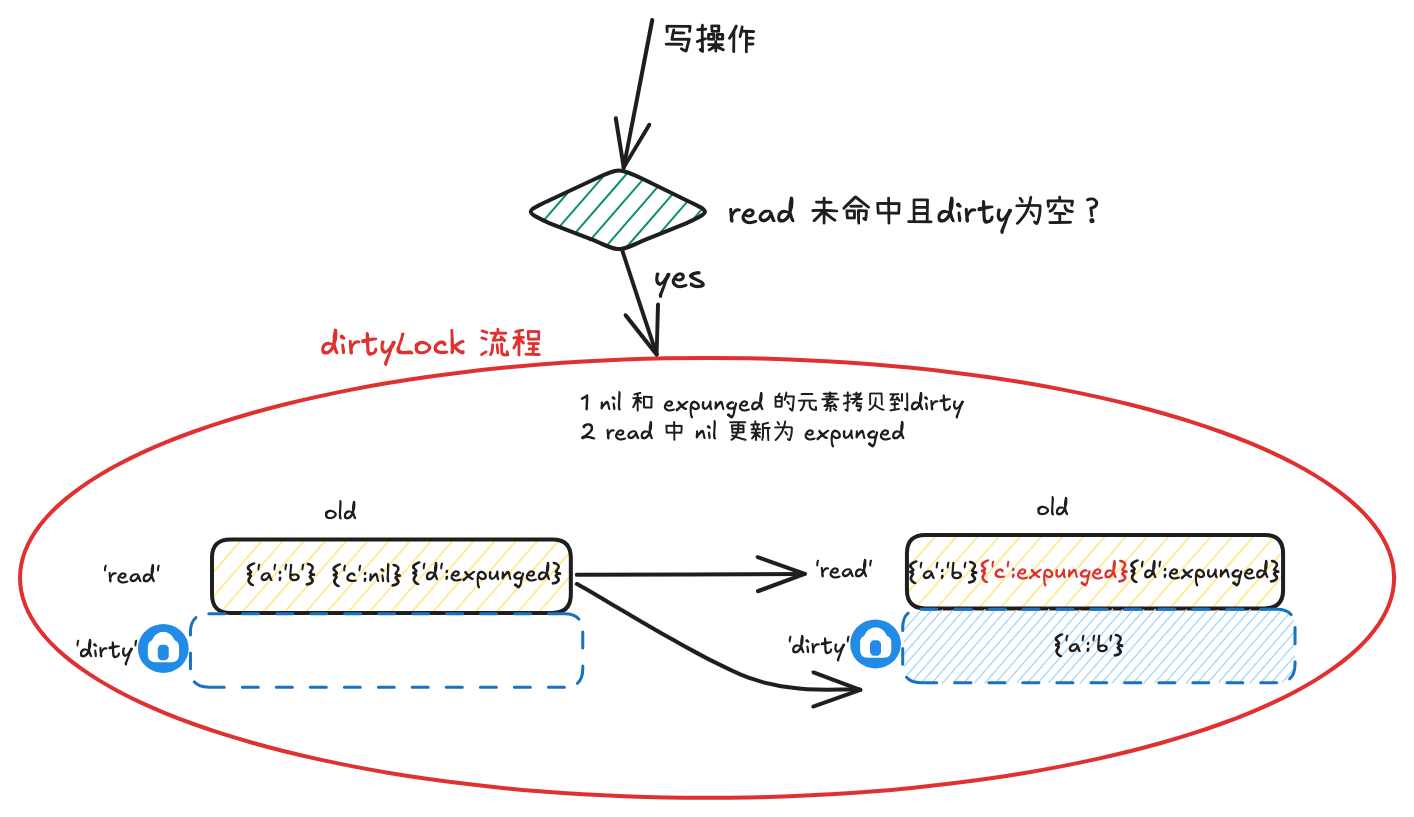
- 在写流程中,倘若需要将 key-entry 插入到兜底的 dirty map 中,并且此时 dirty map 为空(从未写入过数据或者刚发生过 missLocked),进入 dirtyLocked 流程
- 此时会遍历一轮 read map,将未删除的 key-entry 对拷贝到 dirty map 当中
- 在遍历时,还会将 read map 中软删除 nil 态的 entry 更新为硬删除 expunged 态,因此在此流程中,不会将其拷贝到 dirty map
# 4. 删流程 🗑️
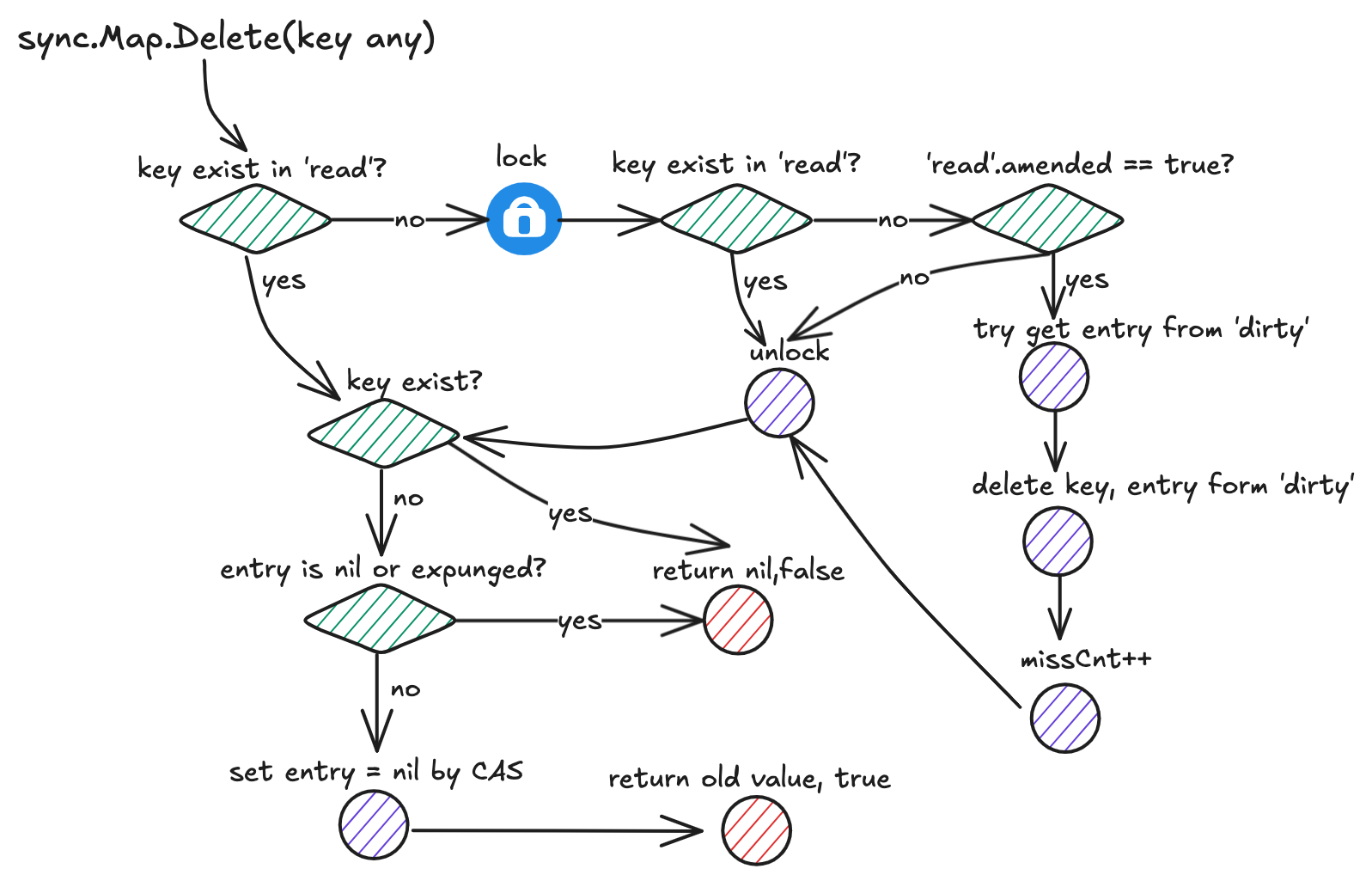
# 4.1 sync.Map.Delete() 🗑️
func (m *Map) Delete(key any) { | |
m.LoadAndDelete(key) | |
} | |
func (m *Map) LoadAndDelete(key any) (value any, loaded bool) { | |
read := m.loadReadOnly() | |
e, ok := read.m[key] | |
if !ok && read.amended { | |
m.mu.Lock() | |
read = m.loadReadOnly() | |
e, ok = read.m[key] | |
if !ok && read.amended { | |
e, ok = m.dirty[key] | |
delete(m.dirty, key) | |
m.missLocked() | |
} | |
m.mu.Unlock() | |
} | |
if ok { | |
return e.delete() | |
} | |
return nil, false | |
} |
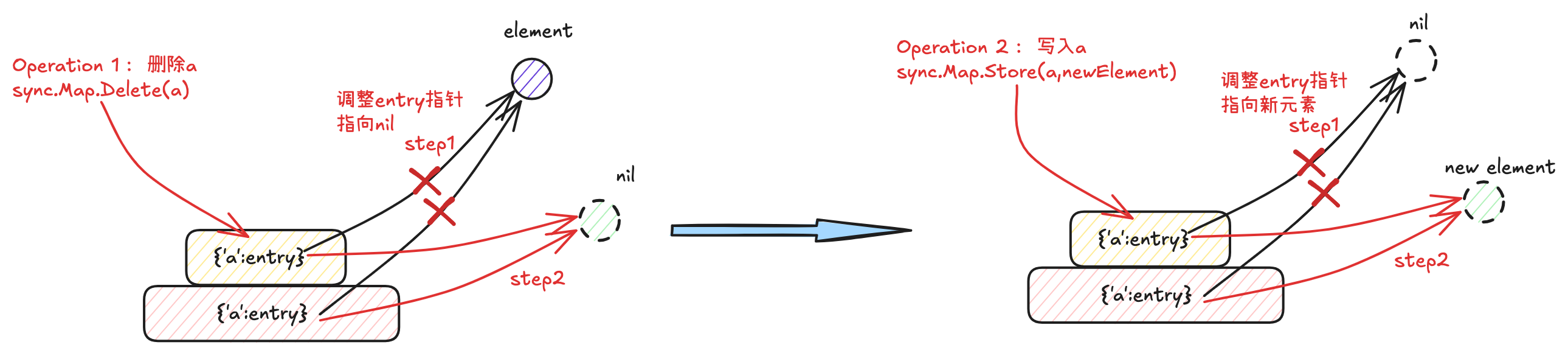
- 倘若 read map 中存在 key,则直接基于 cas 操作将其删除
- 倘若 read map 不存在 key,且 read map 有缺失 (amended flag 为 true),则加锁 double check;
- 倘若加锁 double check 时,read map 仍不存在 key 且 read map 有缺失,则从 dirty map 中取元素,并且将 key-entry 对从 dirty map 中物理删除
- 走入步骤 3,删操作需要和 dirty map 交互,需要走进 missLocked 流程
- 解锁
- 倘若从 read map 或者 dirty map 中获取到了 key 对应的 entry, 则走入 entry.delete () 方法逻辑删除 entry
- 倘若 read map 和 dirty map 中均不存在 key,返回 false 标识删除失败
# 4.2 entry.Delete() 🗑️
func (e *entry) delete() (value any, ok bool) { | |
for { | |
p := e.p.Load() | |
if p == nil || p == expunged { | |
return nil, false | |
} | |
if e.p.CompareAndSwap(p, nil) { | |
return *p, true | |
} | |
} | |
} |
- entry 的逻辑删除流程
- 倘若 entry 此前已被删除,则直接返回 false 标识删除失败
- 倘若 entry 当前仍存在,则通过 CAS 将 entry.p 指向 nil,标识其已进入软删除状态
# 5. 遍历流程 🔄
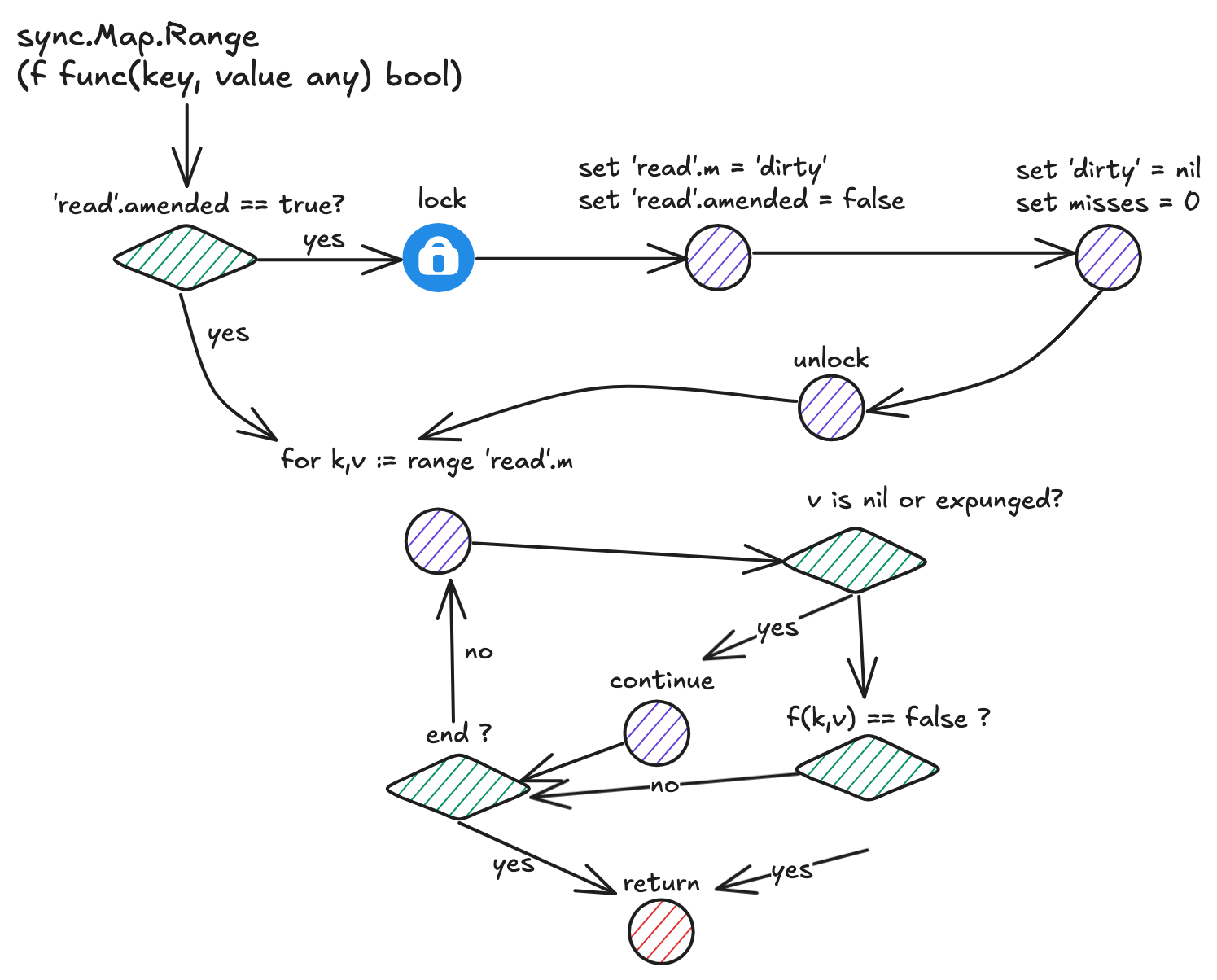
func (m *Map) Range(f func(key, value any) bool) { | |
read := m.loadReadOnly() | |
if read.amended { | |
m.mu.Lock() | |
read = m.loadReadOnly() | |
if read.amended { | |
read = readOnly{m: m.dirty} | |
copyRead := read | |
m.read.Store(©Read) | |
m.dirty = nil | |
m.misses = 0 | |
} | |
m.mu.Unlock() | |
} | |
for k, e := range read.m { | |
v, ok := e.load() | |
if !ok { | |
continue | |
} | |
if !f(k, v) { | |
break | |
} | |
} | |
} |
- 在遍历过程中,倘若发现 read map 数据不全(amended flag 为 true),会额外加一次锁,并使用 dirty map 覆盖 read map
- 遍历 read map(通过步骤 1 保证了 read map 有全量数据),执行用户传入的回调函数,倘若某次回调时返回值为 false,则会终止全流程
# 6. 总结 📝
# 6.1 entry 的 expunged 态 🔍
为什么使用 expunged 态来区分软硬删除呢?仅用 nil 一种状态来标识删除不可以吗?
无论是软删除 (nil) 还是硬删除 (expunged),都表示在逻辑意义上 key-entry 对已经从 sync.Map 中删除,nil 和 expunged 的区别在于:
- 软删除态(nil):read map 和 dirty map 在物理上仍保有该 key-entry 对,因此倘若此时需要对该 entry 执行写操作,可以直接 CAS 操作
- 硬删除态(expunged):dirty map 中已经没有该 key-entry 对,倘若执行写操作,必须加锁 (dirty map 必须含有全量 key-entry 对数据)
设计 expunged 和 nil 两种状态的原因,就是为了优化在 dirtyLocked 前,针对同一个 key 先删后写的场景,通过 expunged 态额外标识出 dirty map 种仍具有指向该 entry 的能力,这样能够实现对一部分 nil 态 key-entry 对的解放,能够基于 CAS 完成这部分内容写入操作而无需加锁。
# 6.2 read map 和 dirty map 的数据流转 🔄
- read map: 访问全程无锁 🔓
- dirty map: 是兜底的读写 map,访问时需要加锁 🔒
之所以这样处理,是希望能根据对读、删、更新、写操作频次的探测,来实时动态地调整操作方式,希望在读、更新、删频次较高时,更多地采用 CAS 的方式无锁化地完成操作;在写操作频次较高时,则直接了当地采用加锁操作完成.
因此, sync.Map 本质上采取了一种以空间换时间 + 动态调整策略的设计思路,下面对两个 map 间的数据流转过程进行详细介绍:
# 6.2.1 两个 map 🗺️
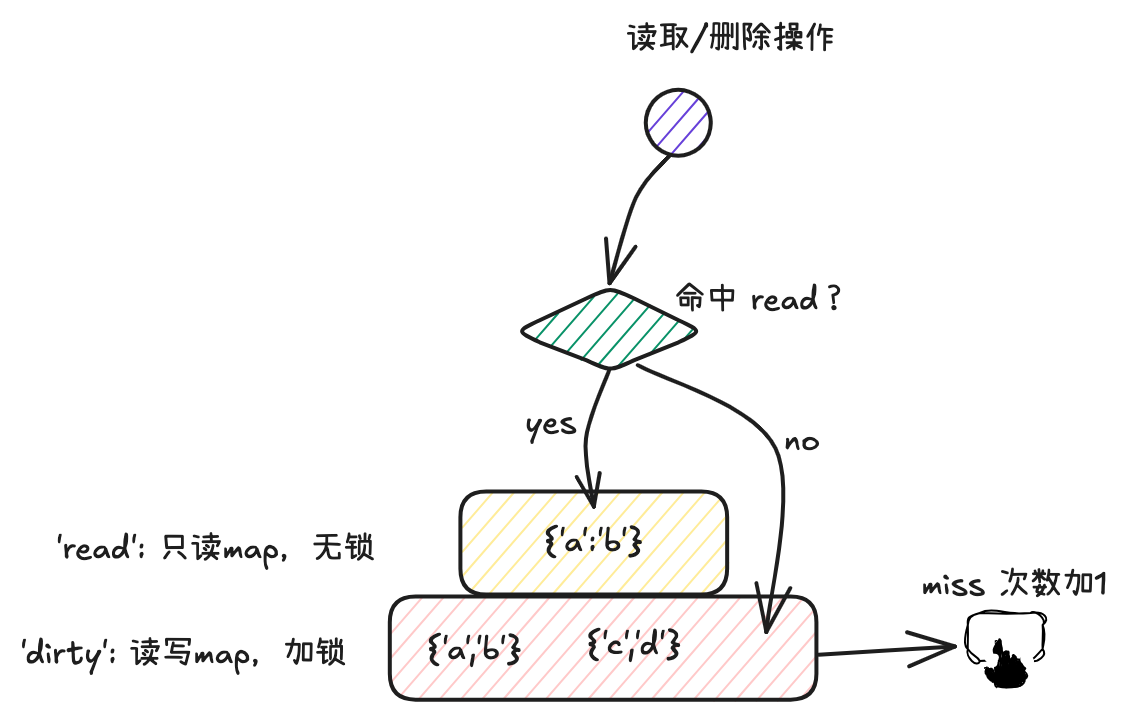
- 总体思想,希望能多用 read map,少用 dirty map,因为操作前者无锁,后者需要加锁
- 除了 expunged 态的 entry 之外,read map 的内容为 dirty map 的子集
# 6.2.2 dirty map -> read map 📈
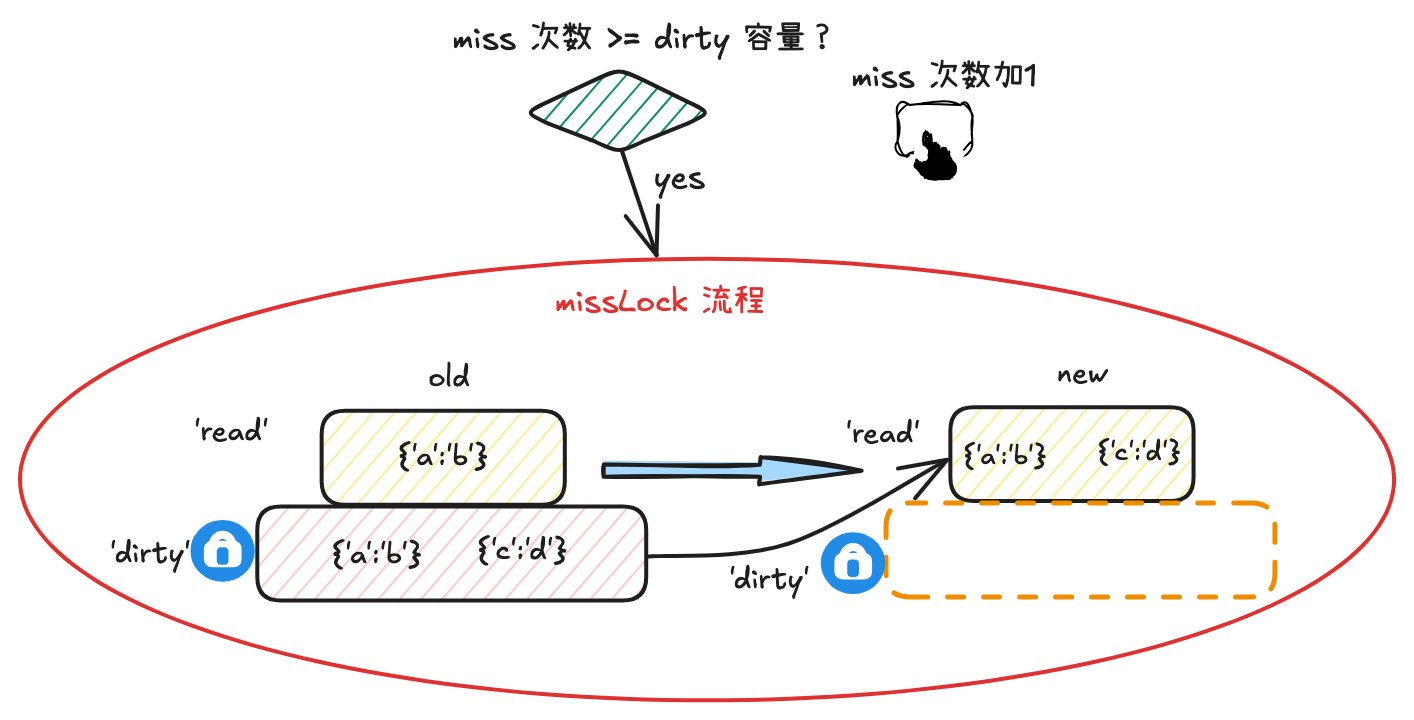
记录读 / 删流程中,通过 misses 记录访问 read map miss 由 dirty 兜底处理的次数,当 miss 次数达到阈值,则通过 missLocked 流程,进行新老 read/dirty 替换流程;此时将老 dirty 作为新 read,新 dirty 则暂时为空,直到 dirtyLocked 流程完成对 dirty 的初始化
# 6.2.3 read map -> dirty map 📉
- 发生 dirtyLocked 的前置条件:
-
- dirty 暂时为空(此前没有写操作或者近期进行过 missLocked 流程)
-
- 接下来一次写操作访问 read 时 miss,需要 dirty 兜底
-
- 在 dirtyLocked 流程中,需要对 read 内的元素进行状态更新,因此需要遍历,是一个线性时间复杂度的过程,可能存在性能抖动
- dirtyLocked 遍历中,会将 read 中未被删除的元素(非 nil 非 expunged)拷贝到 dirty 中;会将 read 中所有此前被删除的元素统一置为 expunged 态
# 6.3 适用场景与注意问题 ⚠️
- sync.Map 适用于读多、更新多、删多、写少的场景 ✅
- 倘若写操作过多,sync.Map 基本等价于互斥锁 + map ⚠️
- sync.Map 可能存在性能抖动问题,主要发生在读 / 删流程 miss 只读 map 次数过多时(触发 missLocked 流程),下一次插入操作的过程当中(dirtyLocked 流程)💥